0 引 言
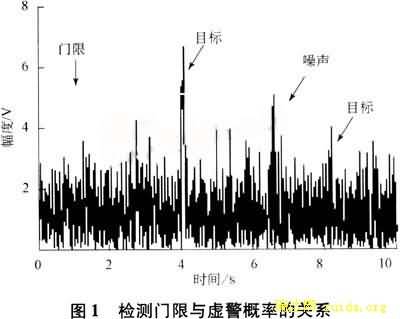
雷达系统的信号检测是在各种噪声和杂波干扰的环境中进行的。视频的回波信号与噪声、杂波一起送到检测器,并在检测器对视频信号进行分级,即设置一个检测门限。如果信号超过该门限,就判决目标存在。显然,门限电平的选择是至关重要的。如图1所示。如果门限设置太高,本来可以检测的弱小目标将被丢失;如果门限设置太低,则虚警太多。由于噪声和杂波干扰具有不确定性,如果采用固定门限,虚警率将随噪声和杂波强度的变化而变化。由计算可知,噪声或杂波的平均电平提高1倍,虚警率将增大4个数量级。这将严重影响检测器的性能和计算机的工作。因此,必须采用自适应门限检测电路,进行恒虚警检测。采用恒虚警处理技术,能够连续地监视噪声或杂波平均电平的变化,及时调整检测门限电平,使其始终保持在最佳检测门限电平上,保持虚警率恒定。
 |
检测器的工作环境中只有杂波时的恒虚警处理称为杂波恒虚警处理;检测器的工作环境中只有噪声时的恒虚警处理称为噪声恒虚警处理。多普勒雷达工作在高重复频率时,俯仰角大于0o,波束在自由空间扫描,没有杂波,只有噪声,属于噪声恒虚警处理。本文利用计算机仿真对单、双门限的噪声恒虚警处理进行了研究。
1 目标检测判决准则及恒虚警检测原理
雷达信号的检测都是以接收机的输出与某个门限电平相比较为基础,因此,可能会出现虚警和漏警两类错误。假设H0是接收机只有噪声的输入事件,H1是信号加噪声的输入事件。D1是认定H1为真的判决,D0是认定H0为真的判决。则虚警概率Pfa和漏警概率Pla为: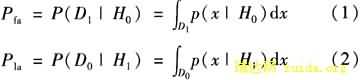
判决门限的确定与选择的最佳准则有关。在雷达信号检测中,因预先不知道目标出现的概率,也很难确定一次漏检所造成的损失,所以,通常选择的准则是保持某一规定的虚警概率下使漏警概率达到最小,或使正确检测概率达到最大。这就是纽曼一皮尔逊准则。
其决策可以写为:
式中:l (x)为似然比;λ实际上就是检测门限。
检测门限的选择一般是根据系统所要求的虚警概率来确定。雷达接收机视频输入的噪声主要由机内热噪声和潜在的人为干扰等组成,可以假设阻塞(噪声)干扰的带宽完全覆盖了被干扰雷达系统的带宽,这样就能按照对待热噪声的方法来处理。热噪声的特点是具有白色功率谱密度和高斯幅度概率密度,可以推导出它加到包络检波器输出的电压振幅| X(K)|服从瑞利分布,其概率密度函数为:![]()
式中:σ为检波前高斯热噪声的均方值;r为检波器输出端噪声包络的振幅值。
由式(1),计算瑞利分布的期望为E(r)= ![]()
假设门限为VT,则超过门限VT的虚警概率为: 
可见,虚警概率将随噪声的功率而变化。如果保持一定的虚警率Pfa,门限VT可表示为:![]()
由式(4)可知,当噪声功率σ增大时,E(r)= ![]() 成比例增大,VT相应增大;同样,
成比例增大,VT相应增大;同样,
当噪声功率σ减小时,VT相应减小。检测门限电平VT总是根据噪声电平的变化自动调整,即实现了雷达恒虚警。
2 恒虚警电路的计算机仿真
2.1 单门限噪声恒虚警处理
图2是采用MATLAB/simulink软件建立的单门限噪声恒虚警电路的仿真模型图。电路首先对噪声进行采样,然后计算噪声均值,再由噪声均值求出检测门限电平,最后检测电路根据该门限电平对信号进行判决检测。由于门限电平与噪声均值成正比,当噪声电平提高时,门限电平上升,从而保持虚警恒定。
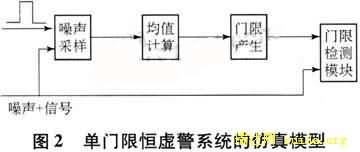 |
噪声采样模块的作用是提取纯噪声,这里由乘法器完成该功能,乘法器的一端接躁声+信号,另一端接雷达休止区脉冲,保证选通的信号只有噪声而没有回波。均值计算模块用来计算噪声的均值,在simulink的DSP工具箱中有做好的模块。门限产生模块由噪声均值和给定的虚警概率按式(4)计算门限电平VT,门限检测模块完成判决功能,当信号电平超过VT时,
输出目标标志。
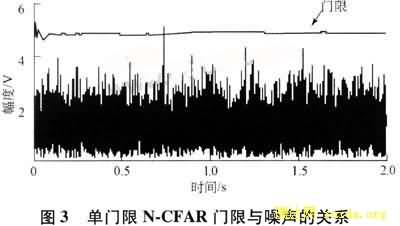
图3是当噪声均方值为10、噪声采样间隔为10-5s、检测的虚警率设为10-5时,单门限恒虚警处理噪声与门限的关系图。图3表明,噪声电平除了在0.75 s时产生虚警,其余时问都没有超过门限电平,显然符合虚警率为10-5的要求。
 |
2.2 双门限恒虚警处理
双门限噪声恒虚警电路的Simulink仿真模型见图4。与单门限恒虚警电路相比,多了1级门限判决,所以电路实现时增加了1级比较器和1级计数器。
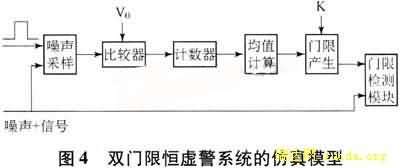 |
经噪声采样后的纯噪声信号送到比较器,比较器的门限为一固定值V0,V0远低于噪声的平均电平,使较多的噪声信号能够通过比较器。过第1门限V0的噪声样本数由计数器计数,设为N0。此计数值与原采样噪声总样本个数Ⅳ相比的值N0/N代表虚警概率Pfa。根据瑞利噪声的概率分布可求得超过第1门限 V0时的概率PV0为: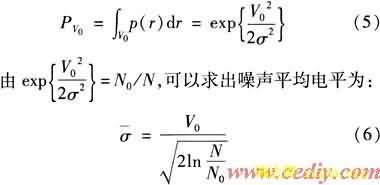
均值计算模块由式(6)求出噪声平均电平σ。门限产生模块由求得的σ按VT=Kσ计算第2门限值,K为一常数,根据虚警多少可自行设置,即可进行人工干预:虚警太多时,提高K值;反之,减小K值。
图5是当第1门限V0=O.4 V、噪声均方值σ为10、噪声采样间隔为10-5s时,双门限恒虚警处理电路噪声与门限的关系图。图中分别绘出了K=5和K=6的检测门限曲线,当K=5时门限值约为5 V,此时在0.75 s有一虚警,而K=6时门限也相应提高到6,虚警消除。与图3相比,图5可以通过调整常数K值更加灵活地控制检测门限和虚警率大小。
 |
图5 双门限噪声恒虚瞀处理门限与噪声的关系
由于第2门限(目标检测门限)VT与噪声电平均值成正比,也就是说,当噪声功率增大时,过门限V0的噪声样本个数增多,噪声平均电平升高,VT成比例增大;同样,当噪声功率减小时,VT相应减小。检测门限电平VT总是根据噪声电平的变化自动调整,使雷达输
出的虚警概率恒定。
3 结束语
采用单门限或双门限的噪声恒虚警处理方案,可使雷达在恒虚警率下进行目标检测。通过对检测门限的人工干预,可使超过门限的尖头噪声个数大大减少,改善雷达显示画面的噪声背景。由于检测门限能够跟随噪声电平自动调整,如果遇到敌方干扰机的噪声干扰,检测门限自动提高,要使干扰有效,就必须大大提高干扰机的输出功率,因此,恒虚警处理具有抗积极噪声干扰的作用。
|
|
|






















