Application Among Paralleled Inverters on CAN Bus
Abstract: The principle of inverters parallel operation has been analyzed. It proposed a control scheme for inverter modules in parallel operation based on CAN Bus in the DSP chip (TI TMS320LF2407A), using the CAN for communication among electronic control units. The system has many good features, which make it a very promising candidate in terms of configuration flexibility, redundancy, robustness. The method of realizing this system based on CAN Bus in hardware and software will be described in detail in this paper.
Key words: CAN Bus; DSP ; inverter; parallel
ժҪ���������Դ��������ԭ������������TMS320LF2407AоƬ����ǶCAN���������ص㣬�����һ������TMS320LF2407A����CAN����ģ�������Դ����ϵͳ��ʵ���˶Բ��������ģ�����е�ʵʱͨ�ţ�ϵͳ���нṹ��ࡢ���ݷ��㡢�ɿ��Ըߵ��ŵ㡣������CAN���߽ӿ�Ӳ����ƺ�������ƣ���ʵ�������еõ�Ӧ�ú���֤��
�ؼ��ʣ��ֳ����ߣ������źŴ�����������Դ������
1 ����
����Դ�IJ������У�������ʵ�ֹ��ʺϳɣ���������ɻ�ľʽ����������ܻ��ķֲ�ʽ���ʵ�Դ����ϵͳ���ǵ�Դ������չ����Ҫ�����ֳ����߿��Ƽ������Է���ع����ֲ�ʽ����Դ�����������ʹ�ý�����Դϵͳ�Ӵ�ͳ�ļ���ʽ������ֲ�ʽ�����������ܵ�Դϵͳ����ģʽ��չ����ʵ��ϵͳ���ܻ����Ƶ���Ч�ֶΡ����Ľ���һ�ֻ���CAN�ֳ����ߵ�����Դ�IJ������������TI��˾TMS320LF2407A DSPоƬ���ڲ���Դ��ͨ����Ƕ��CAN���ߴӸ�����ģ���ȡ�������ֳ��������ݣ���Ӧ�ֳ�ǿʵʱ�Բ�����ʵ�ֶ�ģ�鹤���ĵ��ȼ�ء�
2 ����Դ��������
ʵ������Դ�IJ������У���ؼ��������ڸ�����ԴҪ��ͬ�ֵ����ص�������Ҫʵ������Դ�ľ������С���������Դģ�鲢��������ɵ��ǽ�����Դ����ϵͳ����ģ�����Ϊ�����źţ����������֮��IJ���Ҫ��ֱ����Դ�IJ������и��ӵöࡣ����Դ�IJ�����Ҫ����5������[1]������ѹ��Ƶ�ʡ����Ρ���λ���������ͬ��ֻ�����������������������ָ��ع��ʣ��ﵽ��ѵ�����״̬������ʵ������Դ��������Դ��ѹ��ֵ����λ�IJ��춼����������Դ�ĵ������죬��ˣ�ͬ�����к͵������һ�³�Ϊʵ������Դ��������Ҫ������������⡣����Ʋ�����Ƕ��TMS320LF2407A DSPоƬ�е�CAN������ʵ�ֲ�������Դ��ͬ�����к;�����
3 ����DSP��CAN�������
����CAN���ߵ�DSP��������Դ�������Ƶ�Ӳ����ƽṹ��ͼ��3-1��ʾ��DSP���ݲ�����õķ���ֵ�����ֵ���бȽϣ��������PWM���壬��������Ź��ʿ��أ����Ƶ�ʡ���ֵ����λ�ɵ������ҵ�ѹ��CAN��������������CAN���ߵ�����ʵ�ֶԲ�������Դģ��Ŀ��ơ�

ͼ3-1 ϵͳӲ���ṹ
3.1 CAN����Ӳ�����
DSPоƬTMS320LF2407A����Ƕ��һ��CAN��������CAN����ͨѶ�ڱ���ʵ�ֵ������������ʵ��������Ҫ�����ã���Ϊ���������ṩ��ͬ���ź��Լ���������ֵ�����ݴ��͡�����CAN���߽ӿ�ʱ����������CAN���߽�����[2]�� DSPоƬTMS320LF2407A����3.3V��Դ���磬 TI��˾ר��Ϊ3.3 V�����240xϵ��DSP�����3���ͺŵ�CAN�����շ�������SN65HVD230��SN65HVD231��SN65HVD232�����Ƕ��Dz���3.3 V��Դ��������������120���ڵ㣬�¶����ߵ�һ��ֵʱ�������Զ��رգ��ڵ��ϵ����ȥ�������ϵ������ڵ�û��Ӱ�죬��ϵ������֧�ִ������ʸߴ�1Mbps���ڱ�ϵͳ�о���ѡ����SN65HVD232��ΪCAN���������������ŷֲ���ͼ3-2��ʾ������1(D)���ڷ������ݣ�����4(R)���ڽ������ݣ�����Ӧ�ֱ����ӵ�DSPоƬ��CANTX/IOP6��CANTX/IOP7��
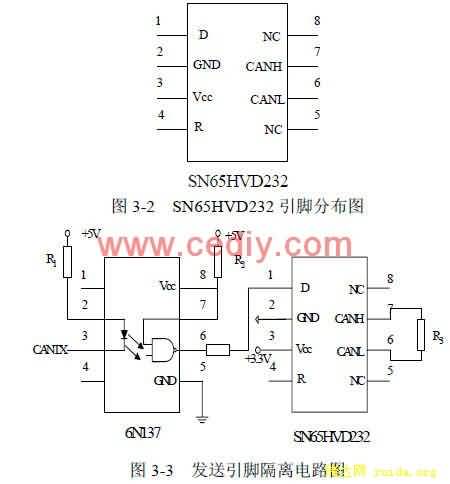

Ϊ�˽�һ�����ϵͳ�Ŀ�����������������DSP��CANͨѶ֮��ʹ���˸��ٹ���6N137���ɸ����·��ͼ3-3��3-4��ʾ������6N137���ٹ���������CAN�������ٶȿ��Դﵽ�͵�����������ʱ���ٶ�һ��[3]�����ݷ�����ͼ��CANTX�����ݽ��ո����·�е�CANRX��ΪDSP�ϵ����ţ�CANTXΪCAN�����������ţ�CANRXΪCAN�����������ţ���·�е�R1Ϊ�������裬����6N137�����������С��7.5mA������R2Ϊ�������裻����R3ΪCAN�����������˵�ƥ����裬����ѡȡ����120������[4],ƥ����������൱��Ҫ�����ã����Ե����ǣ���ʹϵͳ����ͨ�ŵĿ������Դ������������������
3.2 CAN�����������
����Ʋ������������ӿ��Ʋ���ʵ�ֶԲ�������Դϵͳ��ͨ�š����д�ģ���ͬ���źš�����˲ʱ��ֵ��ȡ����ģ�顣Ϊ����Ӧ���������Ҫ������ģ����ϵ�������ϵͳ�Ĺ���̱������ģ���Ƕ�̬ȷ���ġ�ÿ��һ����ʱ�䣬����ģ�鶼Ҫ�㲥һ�������������������δȷ����ģ�顢�����Ѿ�ȷ������ģ����������ȷ����������������ģ��Ϳ��Գ�Ϊ�µ���ģ�顣�����������ӿ��Ƶ�ԭ����ijһ��ģ��ʧЧ������£���������ģ�龺����Ϊ��ģ�飬����ԭ����ģ��ĵ�λ�������Ļ��ƿ��Ա�֤����ϵͳ������Ϊһ̨ͨ�����ڵ��̱������������ģ��ͨ��ϵͳ��̱��[5]��
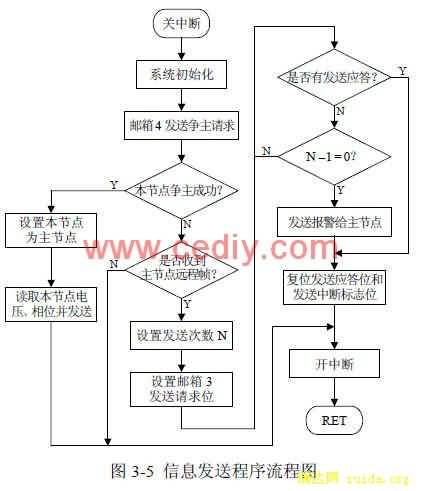
��TMS320LF2407A��CAN�������ı����Ҫ�����ü�������������ݵĽ��պͷ��ͣ�������6�����䣬2������(0��1��)��2������(4��5��)��2��������(2��3��)��ÿ���������ݳ���Ϊ8B����������3Ϊ���ͷǹ㲥���䣬����2Ϊ���շǹ㲥��Ϣ���䣬����4Ϊ���㲥�����䣬����0Ϊ���չ㲥�����䡣����ͨ��ϵͳ��Ҫ��Ϊһ�����ڵ�Ͷ���ӽڵ㣬��������4����һ����ʱ�䶨���Թ㲥����ʽ�����߷�������������̽�����ڵ��Ƿ�������������0�Ĺ��ܾ��ǽ��ղ�������������Ϣ�����ж������ĵ�λ�������Ƿ���������4���ͷ���������������2����Ҫ�����ǽ������ڵ�Ŀ�����Ϣ������֪ͨ����3������Ӧ����Ӧ��Ϣ����ͼ3-5�и����˹�����Ϣ�������̵�������
4 ʵ��
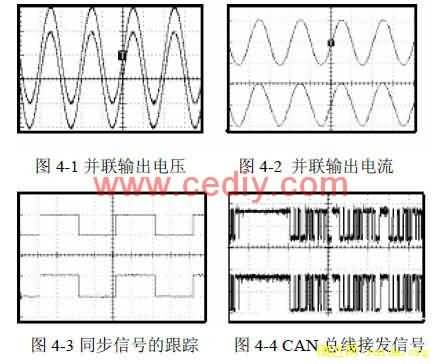
���ݱ��������CAN�ֳ����ߵ�����Դ�����Ŀ��Ʒ���������̨����Դ�Ͻ����˲���ʵ�顣ͼ4-1Ϊ��̨��������Դ�����ѹ����ѹ��ֵ100V/��ͼ4-2Ϊ��̨��������Դ���������������ֵ10A/��������Ч���ܺá�ͼ4-3Ϊ��ģ�������ģ���ͬ���źţ�ͼ4-4��ʾ������ģ��CAN���߷��͵��ź����ģ���CAN���߽��յ��źţ��ź��ڴ�������û�ж�ʧ��һ���Էdz��ã��ﵽ��Ԥ�ڵ�Ч����
5 ������
���ĵ����������LF2407A������ǶCAN���߿��Ƽ�������ع����˷ֲ�ʽ����Դ���������������ʹ����Դ����������㣬ͬʱΪ��ģ���ṩ���ȶ��ɿ�������ͨ�ţ�֧������Դ���Ȳ���ԣ�ϵͳ���нṹ��ࡢ���ݷ��㡢�ɿ��Ըߵ��ŵ㡣
�������ߴ��µ㣺������������źŴ�����DSP��Ƕ��CAN�ֳ�����ʵ��������Դ�IJ������У�
(1)Ӧ��CAN����ʵ��������ģʽ�IJ������ԣ�ͬ���źź͵�������ֵ�����ݾ�CAN����ͨѶ��ɣ�
(2)ϵͳ��Ӳ����������Ʒ���Ƚ������о���CAN������ʵ���е�Ӧ�����⣬������ʵ��������ʵ�����ȶ����У�
(3)ϵͳ�ṹ�����ݷ��㣬����ʵ��������ơ�
�����
[1]�º�,������. ����Դ��������.�繤����ѧ��,2002,(10):55-59
[2]��ïʢ,���̫,���. ����TMS320LF2407A����CANͨ��ʱ��Ҫע��ļ������⼰�Բ�.�����������Ӧ��,2004,(7):99-101
[3]��ϣ��,�ū^,������,��ʫ;. CAN������Ӧ�ü���.�������Ϣ,2002,18(9):3-5
[4]֣����. ͨ������Դ���������ӿ����.�繤������־,2002,(10):47-49 52
[5]����,�ⳤ��,�˺���,��ΰ��. CAN����������Դģ��ͨ���е�Ӧ��.���������,2005,(3):210-211


















