 打印本文
打印本文  关闭窗口
关闭窗口 Application Among Paralleled Inverters on CAN Bus
Abstract: The principle of inverters parallel operation has been analyzed. It proposed a control scheme for inverter modules in parallel operation based on CAN Bus in the DSP chip (TI TMS320LF2407A), using the CAN for communication among electronic control units. The system has many good features, which make it a very promising candidate in terms of configuration flexibility, redundancy, robustness. The method of realizing this system based on CAN Bus in hardware and software will be described in detail in this paper.
Key words: CAN Bus; DSP ; inverter; parallel
摘要:针对逆变电源并联技术原理分析,依据TMS320LF2407A芯片中内嵌CAN控制器的特点,设计了一个基于TMS320LF2407A内置CAN总线模块的逆变电源并联系统,实现了对并联逆变器模块运行的实时通信,系统具有结构简洁、扩容方便、可靠性高的优点。给出了CAN总线接口硬件设计和软件设计,在实验样机中得到应用和验证。
关键词:现场总线;数字信号处理器;逆变电源;并联
1 引言
逆变电源的并联运行,不仅可实现功率合成,且易于组成积木式、冗余化、智能化的分布式大功率电源网络系统,是电源技术发展的重要方向。现场总线控制技术可以方便地构建分布式逆变电源局域控制网,使得交流电源系统从传统的集中式供电向分布式供电乃至智能电源系统供电模式发展,是实现系统智能化控制的有效手段。本文介绍一种基于CAN现场总线的逆变电源的并联,充分利用TI公司TMS320LF2407A DSP芯片的内部资源,通过内嵌的CAN总线从各并联模块获取并解析现场控制数据,响应现场强实时性操作,实现对模块工作的调度监控。
2 逆变电源并联技术
实现逆变电源的并联运行,其关键问题在于各逆变电源要共同分担负载电流,即要实现逆变电源的均流运行。由于逆变电源模块并联运行组成的是交流电源供电系统,各模块输出为交流信号,因而,它们之间的并联要比直流电源的并联运行复杂得多。逆变电源的并联需要满足5项条件[1],即电压、频率、波形、相位和相序的相同,只有这样才能消除环流、均分负载功率,达到最佳的运行状态,真正实现逆变电源并联。电源电压幅值与相位的差异都会引起逆变电源的电流差异,因此,同步运行和电流输出一致成为实现逆变电源并联控制要根本解决的问题。本设计采用内嵌在TMS320LF2407A DSP芯片中的CAN总线来实现并联逆变电源的同步运行和均流。
3 基于DSP的CAN总线设计
基于CAN总线的DSP控制逆变电源并联控制的硬件设计结构框图如3-1所示。DSP根据采样获得的反馈值与给定值进行比较,控制输出PWM脉冲,驱动逆变桥功率开关,输出频率、幅值、相位可调的正弦电压。CAN控制器接收来自CAN总线的命令实现对并联逆变电源模块的控制。

图3-1 系统硬件结构
3.1 CAN总线硬件设计
DSP芯片TMS320LF2407A中内嵌了一个CAN控制器,CAN总线通讯在本文实现的逆变器并联的实现中起到重要的作用,它为并联运行提供了同步信号以及电流给定值的数据传送。当与CAN总线接口时,必须配上CAN总线接受器[2], DSP芯片TMS320LF2407A采用3.3V电源供电, TI公司专门为3.3 V供电的240x系列DSP设计了3种型号的CAN总线收发器,即SN65HVD230、SN65HVD231和SN65HVD232。它们都是采用3.3 V电源,总线上最多可连120个节点,温度升高到一定值时,总线自动关闭,节点上电或移去对总线上的其他节点没有影响,该系列器件支持传输速率高达1Mbps。在本系统中就是选用了SN65HVD232作为CAN接受器,它的引脚分布如图3-2所示。引脚1(D)用于发送数据,引脚4(R)用于接收数据,它们应分别连接到DSP芯片的CANTX/IOP6和CANTX/IOP7。
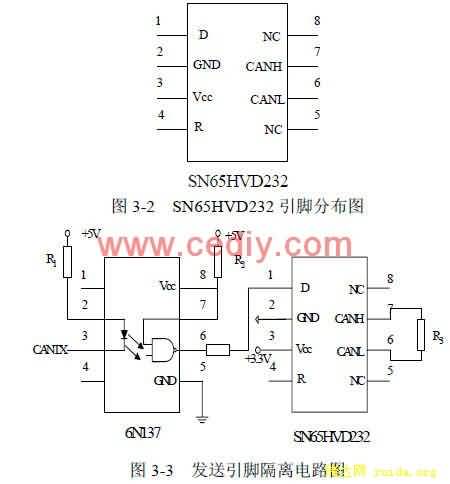

为了进一步提高系统的抗干扰能力,在两个DSP的CAN通讯之间使用了高速光耦6N137构成隔离电路如图3-3,3-4所示。采用6N137高速光电耦合器,CAN的网络速度可以达到和电阻网络驱动时的速度一样[3]。数据发送隔离图中CANTX和数据接收隔离电路中的CANRX均为DSP上的引脚,CANTX为CAN发送数据引脚,CANRX为CAN接受数据引脚,电路中的R1为限流电阻,光耦6N137输入电流不能小于7.5mA;电阻R2为上拉电阻;电阻R3为CAN总线网络两端的匹配电阻,这里选取的是120Ω电阻[4],匹配电阻起着相当重要的作用,忽略掉它们,会使系统数据通信的抗干扰性大大降低甚至无法正常工作。
3.2 CAN总线软件设计
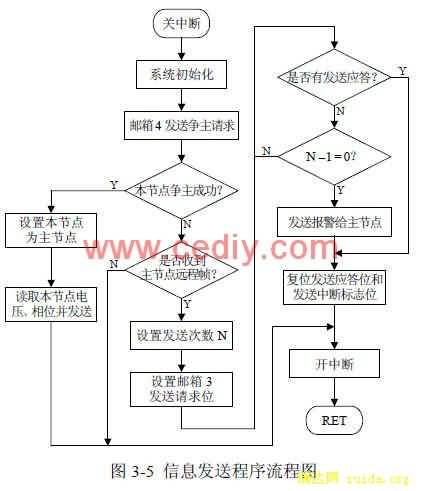
本设计采用争主的主从控制策略实现对并联逆变电源系统的通信。所有从模块的同步信号、电流瞬时幅值基准取自主模块。为了适应并联冗余的要求,避免主模块故障导致整个系统的工作瘫痪,主模块是动态确立的。每隔一定的时间,各个模块都要广播一个“争主”请求,如果尚未确立主模块、或者已经确立的主模块故障则最先发出“争主”请求的模块就可以成为新的主模块。利用争主主从控制的原则,在某一主模块失效的情况下,由其他从模块竞争成为主模块,代替原有主模块的地位,这样的机制可以保证整个系统不会因为一台通信主节点的瘫痪造成整个逆变模块通信系统的瘫痪[5]。
对TMS320LF2407A的CAN控制器的编程主要是利用几个邮箱进行数据的接收和发送,配置有6个邮箱,2个接收(0,1号),2个发送(4,5号),2个可配置(2,3号);每个邮箱数据长度为8B。设置邮箱3为发送非广播邮箱,邮箱2为接收非广播信息邮箱,邮箱4为发送广播的邮箱,邮箱0为接收广播的邮箱。整个通信系统主要分为一个主节点和多个子节点,其中邮箱4,在一定的时间定期以广播的形式向总线发送争主请求,以探测主节点是否工作正常。邮箱0的功能就是接收并区分这两种信息,并判断自身的地位,决定是否利用邮箱4发送反对争主请求。邮箱2的主要功能是接收主节点的控制信息,并且通知邮箱3发送响应的响应信息。在图3-5中给出了关于信息发送流程的描述。
4 实验
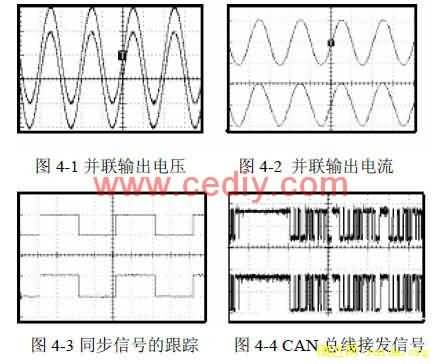
根据本文提出的CAN现场总线的逆变电源并联的控制方案,在两台逆变电源上进行了并联实验。图4-1为两台并联逆变电源输出电压,电压幅值100V/格,图4-2为两台并联逆变电源输出电流,电流幅值10A/格,表明均流效果很好。图4-3为从模块跟踪主模块的同步信号,图4-4显示的是主模块CAN总线发送的信号与从模块的CAN总线接收的信号,信号在传送过程中没有丢失,一致性非常好,达到了预期的效果。
5 结束语
本文的设计利用了LF2407A自身内嵌CAN总线控制技术方便地构建了分布式逆变电源局域控制网,不仅使逆变电源并联方法简便,同时为各模块提供了稳定可靠的数据通信,支持逆变电源的热插拔性,系统具有结构简洁、扩容方便、可靠性高的优点。
本文作者创新点:充分利用数字信号处理器DSP内嵌的CAN现场总线实现了逆变电源的并联运行:
(1)应用CAN总线实现了争主模式的并联策略,同步信号和电流给定值等数据经CAN总线通讯完成;
(2)系统在硬件和软件设计方面比较深入研究了CAN总线在实际中的应用问题,制作了实验样机,实现了稳定运行;
(3)系统结构简单,扩容方便,便于实现冗余设计。
参考文献
[1]陈宏,胡育文. 逆变电源并联技术.电工技术学报,2002,(10):55-59
[2]毋茂盛,余达太,李果. 利用TMS320LF2407A进行CAN通信时需要注意的几个问题及对策.计算机工程与应用,2004,(7):99-101
[3]田希晖,张玘,张连超,罗诗途. CAN总线及其应用技术.微计算机信息,2002,18(9):3-5
[4]郑建斌. 通信逆变电源及监控网络接口设计.电工技术杂志,2002,(10):47-49 52
[5]姜江,吴长奇,顾和荣,邬伟扬. CAN总线在逆变电源模块通信中的应用.计算机工程,2005,(3):210-211
打印本文 关闭窗口