摘要:研究了一种适合宽负载条件运行的有限双极性控制方法并配合饱和电感和隔直电容实现ZVZCS PWM的全桥变换器,分析了其工作过程及主开关器件实现ZVZCS的约束条件。最后通过具体的功率实验.验证了该控制方法在较宽负载范围条件下实现软开关的能力。
关键词:有限双极性控制;零电压零电流开关;饱和电感;全桥变换器
O 引言
全桥移相ZVS变换器近年来得到了广泛关注,在中大功率的通讯电源和电力操作电源中得到广泛的应用。然而,这种控制方法有以下几个明显的缺点。
(1)滞后臂开关管在轻载下将失去零电压开关功能;
(2)为了实现滞后臂的ZVS,必须在电路中串联电感,这会引起占空比丢失,增人了原边电流定额;
(3)原边存在较大环流,增加了系统通态损耗。
为了解决这些问题,人们针对IGBT拖尾电流大的特点义提出了全桥移相ZVZCS变换器。其主要思路是超前臂实现ZVS,滞后臂实现ZCS,从而从根本上解决了原先全桥移相ZVS变换器中滞后臂零电压开关困难的问题。由于不需要外加电感,占空比丢失问题随之解决,环流也大大减小。实现滞后臂的ZCS目前主要有以下几种办法。
(1)副边有源箝位的ZVZCS方法,但增加了成本,并由于需要复杂的隔离驱动而降低了可靠性;
(2)副边无源箝位和原边无源箝位;
(3)利用IGBT的反向雪崩击穿电压;
(4)原边串联饱和电感和隔直阻断电容。
但移相控制本身还有一个难以克服的缺点,即死区时间不好调整。当负载较重时,由于环流大,超前臂功率管上并联的电容放电较快,因此实现零电压导通比较容易,但当负载较轻时,超前臂功率管上并联的电容放电很慢,超前桥臂的开关管必须延时很长时间才能实现ZVS导通。传统的移相控制很难调整这个死区时间。
本文研究了一种名为有限双极性控制的控制方法,配合上面介绍的原边串联饱和电感和隔直电容的ZVZCS PWM全桥拓扑,可以在很宽的负载范围内实现超前臂的ZVS和滞后臂的ZCS。
1 ZVZCS PWM全桥电路有限双极性控制原理分析
l.1 电路拓扑
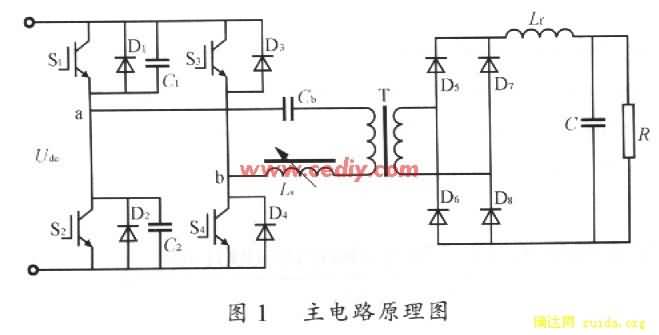
有限双极性控制ZVZCS PWM全桥电路拓扑如图1所示。S1~S4共4个功率管(内带续流二极管)组成一个全桥电路。其中,S1、S2组成超前桥臂,两端分别并联吸收电容C1、C2、S3、S4组成滞后桥臂;Cb为隔直电容,Ls为饱和电感。
l.2 工作原理
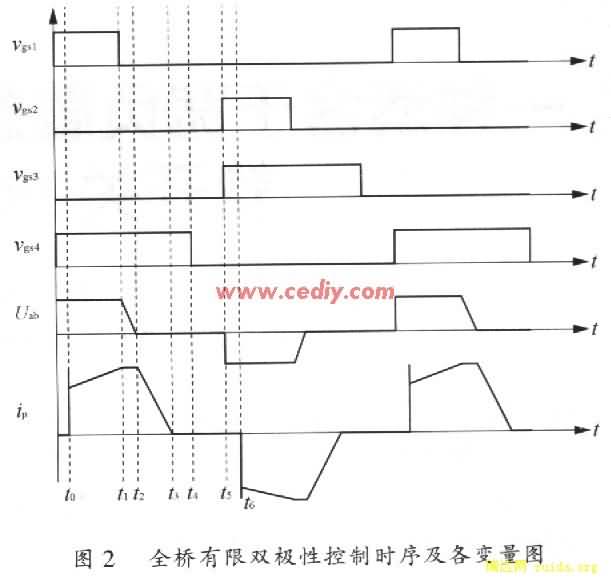
改进传统的移相PWM电路,采用有限双极性的控制方法,超前臂与滞后臂同时开通,并且在超前臂与滞后臂之间串联一个隔直电容Cb以及饱和电感Ls。饱和电感相当于一个开关,有电流的时候电感饱和,相当于短路;没有电流或电流很小时,有较大电感。利用隔直电容在环流期间加速环流衰减,使得滞后臂实现零电流关断,并且利用饱和电感Ls阻止LC振荡电流反向(反向电流不足以使饱和电感饱和,其电感值很大);在滞后臂开通时.由于饱和电感处于不饱和状态,电流上升慢,实现零电流开通。图2所示即为全桥有限双极性控制时序及各主要变量响应图。其中,vgs1~vgs4为S1~S4管的驱动波形,Uab为ab两点间电压,ip为原边电流。
1.2.1 模态1——功率传输
在t0~t1时刻,S1和S4导通,此时电流ip一方面通过变压器原边将电能传输到负载,另一方面给阻断电容cb充电,Ls处于饱和状态,电容Cb电压线性增加。Ip=I0/n恒定不变。如图3所示。

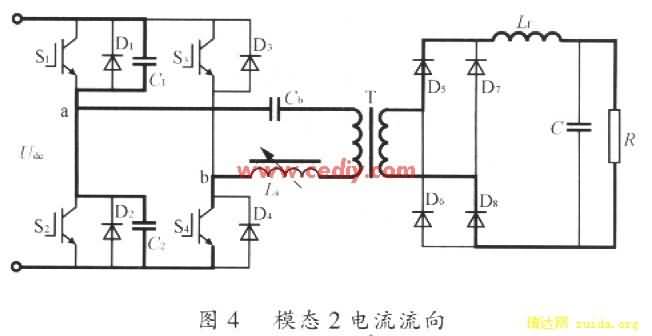
1.2. 2 模态2——超前臂的零电压关断
超前臂S1于t1时刻关断,原边电流ip从S1中转移到C1、C2支路中,C1充电,C2放电。因为C1电压不能突变,开始时为零,实现S1的零电压关断;饱和电抗器流过电流,尚未退出饱和状态,阻抗为零。当Uc2降到零,二极管D2续流,t2时刻S2上的电压为零,为以后S2的零电压开通做好准备。如图4所示。
1.2.3 模态3——Cb阻断环流
t2时刻,ip通过S4和D2续流,阻断电容Cb的电压上升到最大Ucpb。饱和电感Ls尚未退出饱和状态。由于变压器原边的电压为零,原边电流小于副边电流,副边电感使整流二极管D5~D8均处于正向导通阶段,变压器原、副边短路。Ucb全部加在变压器漏感上。在阻断电容Cb的作用下,原边电流迅速下降。如图5所示。

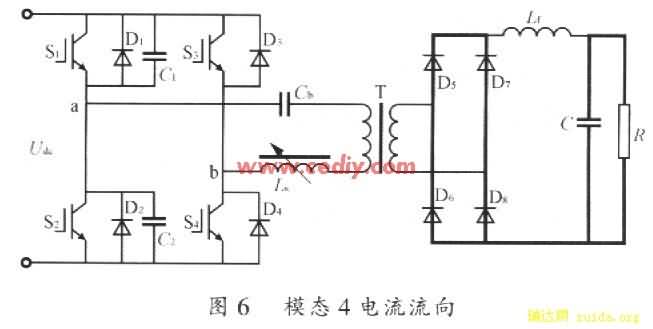
1.2.4 模态4——滞后臂零电压零电流关断
t3时ip下降为零时,在Ucb作用下ip反向变化,由于Ls退出饱和状态,呈现大阻抗,所以阻断电容电压不变,S4仍然导通,但是没有电流流过。t4时滞后臂S4零电压零电流自然关断。此叫不对负载传输功率。如图6所示。
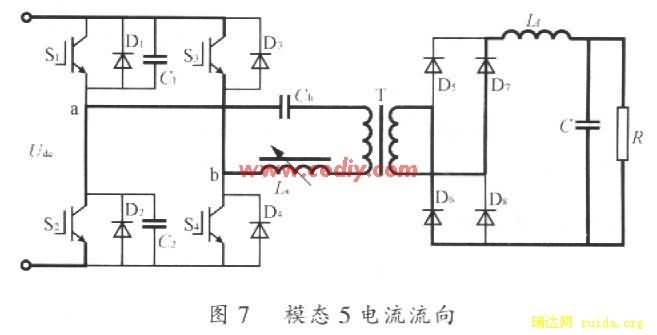
1.2.5 模态5——超前臂零电压零电流开通、滞后臂零电流开通
t5时S2、S3同时开通。在导通的瞬间,由于Ls不饱和,其阻抗很大,电流上升速度缓慢。S2、S3处于零电流导通状态。且开通时电容C2上的电压基本等于零,所以超前臂S2实现了ZVZCS。这段时间内,阻断电容的电压小变,原边电流基本等于零,电源电压加在饱和电感上,经一段时间促使其饱和,然后电流再线性增加。
t6时刻,原边电流上升到I0/n,副边整流二极管D6和D7导通,完成对管间的切换回到模态l的工作状态。如图7所示。
以上是半个周期的工作情况,另一半情况相似。从上面可以看到,滞后臂处于零电流开通和零电流关断;超前臂零电压开通,关断靠并联在管子上的电容实现近似零电压关断。
1.3 全范围实现ZVS和ZCS的约束条件
1.3.1 超前臂实现ZVS的条件
(1)超前臂的零电压关断
由于输出外并电容的存在,可以控制关断管的电压上升速度。电容的容值越大,电压的上升速度越慢,超前臂的零电压关断效果越好。
(2)超前臂实现零电压开通的条件
模态2中C2的放电时间为
![]()
为了保证超前臂的零电压开通,两个超前臂的死区时问td(即t5一t4)必须满足
td≥tr
当轻载时,C2放电需要的时间tr相应增大,但轻载时有限双极性控制的两个超前臂的死区时间也相应增大,从而克服了传统移相控制死区不好调整的问题,因此C1、C2可较大,以改善超前臂零电压关断效果。
1.3.2 滞后臂实现ZCS的条件
由于饱和电感的存在,滞后臂开通瞬间,电路中电流上升速度缓慢,可视为零电流开通。ZCS实现的程度主要取决于饱和电感的阻晰时间(即充磁时间)。阻断时间tm的计算如下。
![]()
式中:N为匝数:
Br为磁芯的饱和磁密:
Bs为磁芯的剩余磁密。
2 双环控制原理及其实现
2.1 电压电流双环控制
传统的方法采用电压模式单闭环控制,这种控制方法响应较慢,也不能对功率器件进行实时电流限制,为了实现电压电流可控,平均电流模式采用双闭环控制,其内环控制输出的平均电流,外环控制输出电压,提高了系统响应速度。
2.2 控制电路设计
采用集成芯片UC3525外加运放构成平均电流模式控制电路,并用外加逻辑电路的方式形成有限双极性控制的4路控制信号。如图8所示。
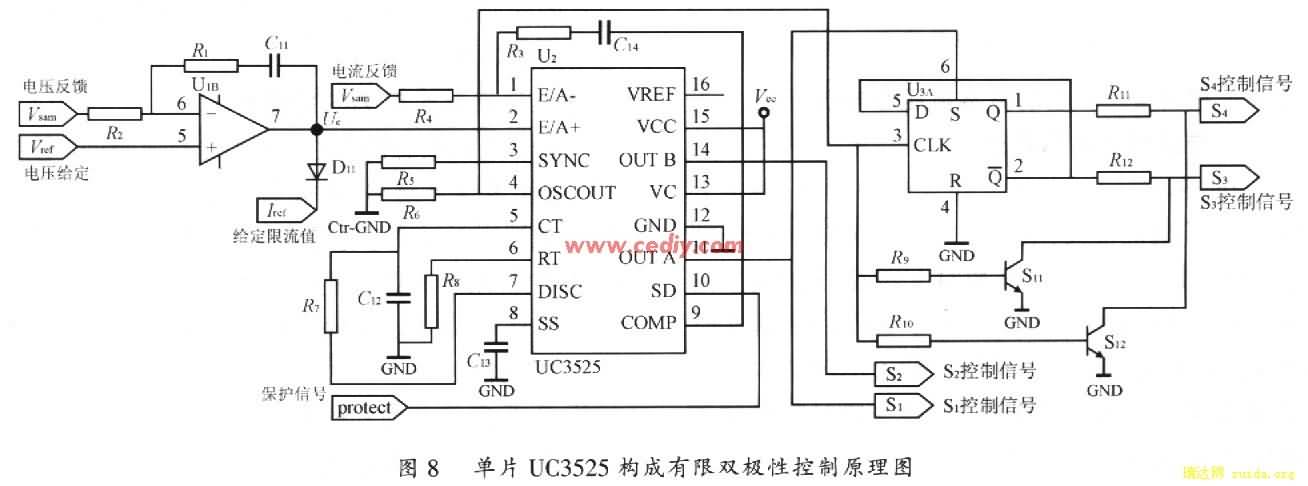
(1)外环控制 电压给定信号与输出电压反馈信号经运放U1补偿比较得Ue,接到UC3525的内部误差放人器正相输入端的脚2。当输出电流超过给定限流值时,D11导通,Ue被箝在给定限流值上。
(2)内环控制 采样电阻检测输出电流,并通过电流检测放大器得电流反馈信号。接到UC3525的内部误差放大器反相输入端的脚1,与Ue进行比较。UC3525的脚9为反馈补偿端。
(3)有限双极性控制 UC3525的脚4为同步信号输出,该信号作为D触发器(U3)的时钟信号,U3的Q端(脚1)和Q端(脚2)即可得到占空比为50%、相位相差180°的两组脉冲,S11、S12用于控制死区时间。
3 仿真与实验验证
这种有限双极性控制的ZVZCS PWM全桥变换器,已应用到一种15KW(300V/50A)电源模块的设计当中。其主要技术参数如下。
输入DC 430~650V直流;
输出DC 170~340V:DC0~50A;
开关工作频率20kHz;
死区时间1 μs;
隔直电容Cb=4 μF;
IGBT并联电容C1=C2=22nF;
变压器原副边匝数比为15:13;
输出滤波电感0.15mH;
输出滤波电容2200μF。
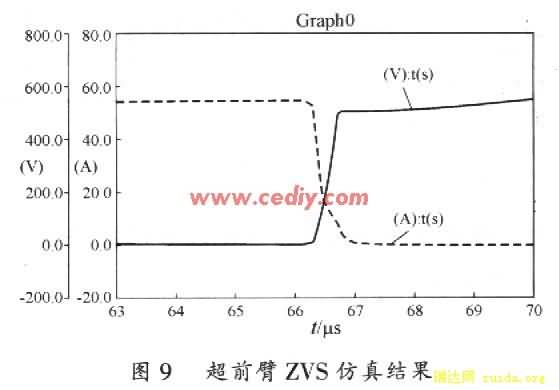
3.l 仿真结果
额定功率下超前臂的ZVS波形如图9所示。
滞后臂的ZCS波形如图10所示。
实验验证了仿真结果的正确性。
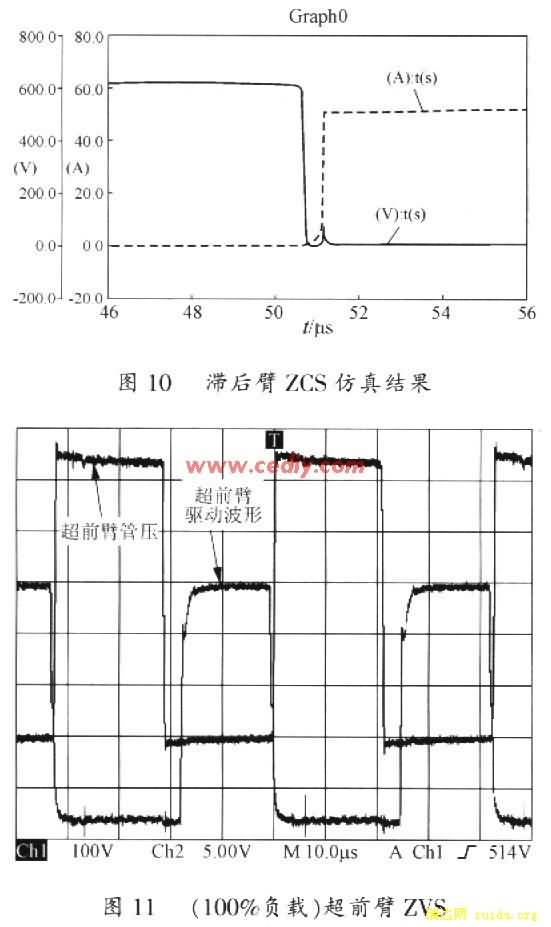
3.2 实验波形
当100%负载时,超前臂实现ZVS波形图如图11所示(管压波形100V/div,驱动波形5V/div)。
从图ll可看出,超前臂开通(即驱动信号为高)时,由于之前反并二极管续流的原因,管压为零。超前臂关断时,由于超前管上并联电容的原因,管压上升缓慢,基本实现超前臂ZVS。从图11中超前臂管压波形中可明显看出,由于软开关的实现,功率管上的电压尖峰基本消除。
滞后臂实现ZCS波形图如图12所示。
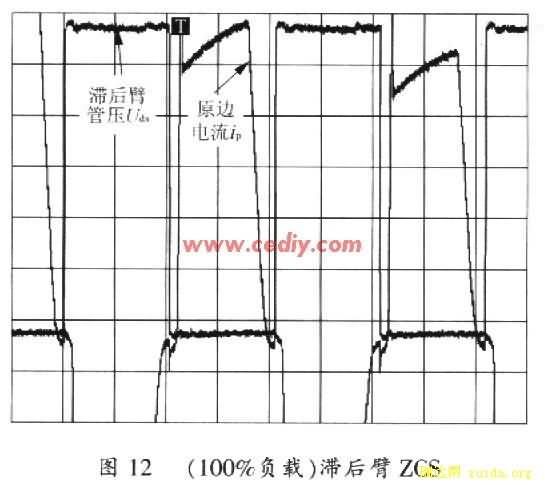
滞后臂开通(即管压从500V变为0V)时,由于饱和电感的存在,电流推迟2μs上升,实现零电流开通。而后超前臂关断,由于隔直电容的存在,电流迅速衰减至零。为滞后臂的零电流关断提供条件。图12中,滞后臂ZCS实现十分理想,原边电流环流衰减迅速,达到预期效果。
l0%负载时,超前臂实现ZVS波形图如图13所示。
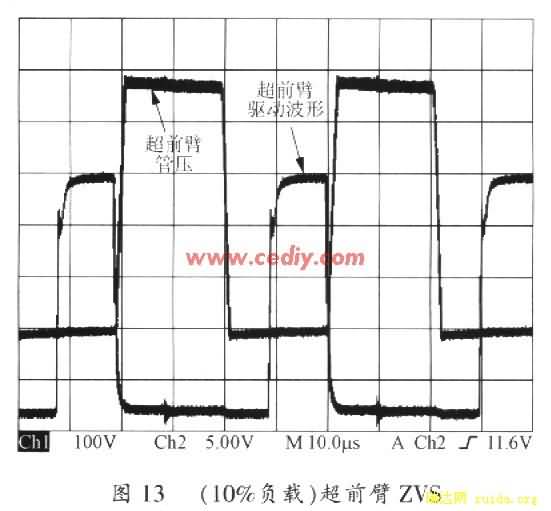
由图13可以看出,轻载时,原边电流变小,并联电容的充放电速度明显减缓,反映在图中即超前臂的管压的上升下降沿变平缓。但此时超前臂的占空比也相应减小,死区时间自动加长,为并联电容提供了足够长的放电时间,保证了超前臂的零电压开通。关断时,由于并联电容充电缓慢的原因,使零电压关断的效果更加理想。
滞后臂实现ZCS波形图如图14所示。
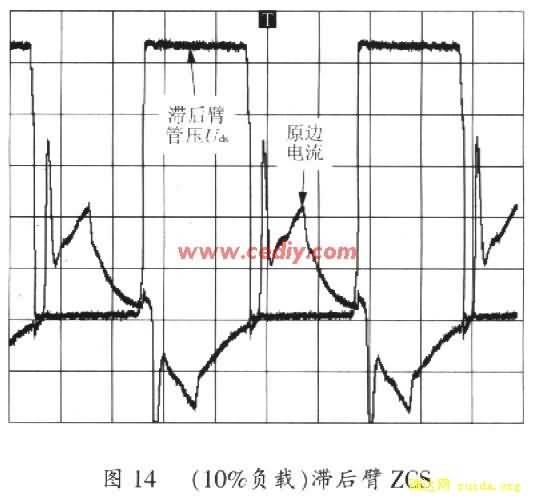
轻载时,占空比相应减小,为原边电流衰减至零提供了充足的时间,保证了滞后臂ZCS的实现。
由以上各图,可明显看出有限双极性控制在10%~lOO%负载范围内超前臂的ZVS和滞后臂的ZCS都实现得十分理想。且从原边电流ip的波形上可明显看出原边环流衰减十分迅速,保证在较宽的负载范围内实现高效率,实验证明整机效率可达94%。
4 结语
(1)采用有限双极性控制的方法克服了移相控制死区调整困难的问题,使得超前臂可以在很宽的负载范围内实现ZVS。而且C1、C2可选取的范围较大,大大改善了超前臂零电压关断的效果。
(2)由于饱和电感的存在,可以在全范围内实现滞后臂的ZCS。隔直电容用来减小环流。
(3)软开关的实现,消除了开关管电压尖峰,降低了开关损耗,可以在较宽的负载范围内实现高效率。

















