摘要:在三相电路瞬时无功功率理论的基础上,分析了运用ipiq运算方法提取谐波的数字实现方式,简化了运算过程,提高了运算的速度;讨论并比较了有源电力滤波器的补偿电流过流的两种控制方法。仿真和实验结果证明了该方法具有良好的实用性。
关键词:有源电力滤波器;ipiq数字运算;谐波
Abstract:
Extracting harmonics with ipiq digital arithmetic approach based on three-phase instantaneous reactive power theory is analyzed, which can simplify calculation processes and decrease calculation time. Two kinds of over-current control strategies of APF are discussed. The feasibility of control methods mentioned above is verified by the results and conclusions of simulations and experiment tests.0 引言
随着电力电子装置的广泛应用,电力系统的谐波问题日益突出,有源电力滤波器(APF)作为动态抑制电网的电力电子装置,以其良好的动态响应速度和补偿特性,得到了迅速的发展和深入的研究[1]。
在有源电力滤波器中,控制信号大多由基于瞬时无功功率理论的谐波电流检测算法产生,三相电路瞬时无功功率理论首先于1983 年提出,此后该理论经不断研究逐渐完善,发展了计算有功功率和无功功率p、q 或有功电流和无功电流ip、iq即可得出三相电流谐波和无功电流的两种检测方法,分别p、q 运算方式和ip、iq,运算方式[2]。
基于瞬时无功功率理论实现的有源电力滤波器在实际中得到广泛的运用,实践证明,该方法相对于其它方法有较好的实时性。
1 基于三相电路瞬时无功功率理论的ip、iq运算检测方法及其数字实现p、q 运算方式在电压有畸变的时候,检测是不准确的,采用ip、iq 运算方式检测时,由于只取sin棕t 及-cos棕t 参与运算,畸变电压的谐波成分在运算过程中不出现,因而结果不受电压波形的影响,检测结果是准确的。本文所用方法为ip、iq,运算方式,原理如图1所示。

图1 ip、iq检测法提取三相谐波的原理框图
由图1 所示的原理图可知,传统的检测方法要经过四次矩阵运算才可以得到谐波分量,计算量大,使用过多的乘法器,影响实时性,本文采用的数字ip、iq算法简化了运算,具体如式(1)所列[3]。
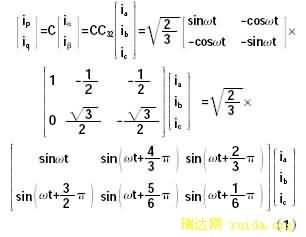
经过低通滤波器得到直流分量ip、iq。直流侧电压的反馈计算通过式(2)得到
负载电流的基波分量计算如式(3)所列。
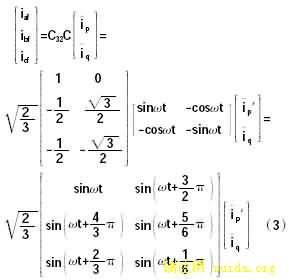
APF补偿参考电流iah、ibh、ich表达式如式(4)所列。

可以看出数字ip、iq算法,简化了运算量,仅通过查表和一次矩阵运算得到ip、iq,经过低通滤波器得到ip、iq,再通过查表和一次矩阵运算得到iaf、ibf、icf,同时参与运算的量均为整型,并采用移位算法,大大减少了程序的运行时间。用这种方法实现参考电流的计算非常简便,节省了DSP控制程序的开销,易于实现。
2 直流侧电压的控制方法
补偿电流发生电路是并联型有源电力滤波器中主要的组成部分。补偿电流发生电路由电压型PWM变流器及其相应的驱动电路、电流跟踪控制电路组成,为保证其有良好的补偿电流跟踪性能,必须将变流器直流侧电容的电压控制在一个适当的值。
本文对直流侧电压的控制原理如图2 所示,并不是将Δip 直接叠加到ip 上,而是转化为一个系数,使得ip在一个范围内变化,最终将直流侧电压控制在参考值。

图2 直流侧电压控制原理图
3 补偿电流的限制[5]
通常,APF 严格按照检测得到的系统谐波电流进行补偿。因此,除APF 装置本身故障造成的故障外,由外部造成的过流主要有两种情况,一种是接入系统的非线性负载突增,造成谐波补偿量的增加;另一种是接入系统发生各种类型的短路或断路故障,造成不对称分量的补偿电流大幅增加。APF的过流主要是因为要跟踪的参考电流超过限制的电流所致。所以从参考电流入手,提出了两种APF 限流补偿方式:截断限流补偿方式和比例限流补偿方式。
截断限流补偿方式是将参考电流中超过限值的部分截断,将其限制在允许的最大值,不超过的部分不改变。具体分析如下:
设APF最大允许电流为imax,计算出的补偿电流为ih,一个周期中得出的补偿电流均与imax 比较,如果一旦检测得到一个大于imax 的值后,这个时刻实际的输出电流就为imax,即凡是大于最大允许电流imax的补偿电流都按照imax的大小作为实际的补偿电流作为输出。
比例限流补偿方式是设定一个时间周期T,用一个周期的参考补偿电流的最大绝对值与APF允许的最大补偿电流比较,可得一个小于1 的比例系数。然后下个周期的补偿电流全部乘以这个系数得到实际的补偿电流。具体分析如下:
设APF最大允许电流为imax,计算出的补偿电流为ih,一个周期中得出的补偿电流均与imax 比较,如果一旦检测得到一个大于imax 的值后,就从这个时刻开始收集这个周期的最大值,设为|ihmax|,在这个周期结束的时刻,算出比例系数,设为k,k= iihmmaaxx <1,这样下个周期得到的补偿电流均要乘以这个比例系数k,然后再作为APF 的实际补偿电流输出。同时收集这个周期的最大值,判断是否大于imax ,如果仍然大于imax,同样算出一个比例系数k 作为下个周期的相乘的系数,如果APF 的补偿电流在接下来的某个周期中恢复到imax以下,则在接下来的一个周期不用再乘以比例系数,计算出的补偿电流作为实际的补偿电流。
4 仿真及试验结果
4.1 电路参数和仿真内容
三相对称380 V 系统,工频50 Hz,带一个三相不可控整流桥,APF 补偿整流桥产生的谐波电流,带阻感负载,电感40 mH,APF 直流侧电压设为750V。由于并联型有源滤波器产生的补偿电流应实时跟踪其指令信号的变化,要求补偿电流发生器具有很好的实时性,采用滞环比较器的瞬时值比较方式。
仿真内容:仿真工具采用Orcad9.1,首先采用截断限流补偿方式,对补偿电流限制最大电流为80A;然后采用比例控制方式,设置补偿电流最大值为80A;比较两者的THD。
试验内容:负载电流为66A,为了更好地对比两者的区别,采用截断限流补偿方式时对补偿电流限制最j/F2+2大电流为20A;然后采用比例控制方式,设置补偿电流最大值为20A。
4.2 结果分析
4.2.1 仿真结果
图3 为负载电流的仿真波形。

图3 负载电流波形
图4(a)为没有限流的A 相补偿电流的波形,图4(b)为截断限流A相补偿电流波形,图4(c)为比例限流A相补偿电流波形。从图4中可以看出,截断限流方式在没有超出限流部分不会改变补偿电流的大小,超出部分被削去尖峰,有很明显的平台;比例限流方式是整体改变补偿电流的大小,整体的波形并没有改变。

(a) 没有限流

(b) 截断限流

(c) 比例限流
图4 补偿电流波形
图4 补偿电流波形
图5(a)为没有限流补偿后的A 相电流波形,图5(b)为截断限流补偿后的A 相的电流波形,图5(c)为比例限流补偿后A 相的电流波形。从图5中可以看出,截断限流补偿后的波形比比例限流补偿后的波形更接近于实际补偿后的电流波形。

(a) 没有限流

(b) 截断限流

(c) 比例限流
图5 补偿后A 相的电流波形
图5 补偿后A 相的电流波形
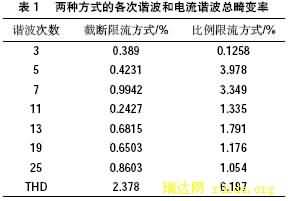
表1 给出了截断限流和比例限流两种方式下各次谐波及电流谐波总畸变率THD。
4.2.2 试验波形
图6 为正常运行时的补偿电流和负载电流波形。

图6 补偿电流波形和负载电流波形
图7 中(a)为没有限流补偿后的A 相电流波形,图7(b)为截断限流补偿后的A 相的电流波形,图7(c)为比例限流补偿后A相的电流波形。

(a) 没有限流

(b) 截断限流

(c) 比例限流
图7 补偿后A 相的电流波形
图7 补偿后A 相的电流波形
从图7 中可以看出,数字ip、iq 算法可以准确计算出补偿电流,并得到了较好的补偿效果。截断限流的补偿效果优越比例限流方式补偿效果。
5 结语
由上述理论推导和仿真及验结果,可知采用ip、iq运算的数字实现方式使得有源电力滤波器的实时性进一步提高,提高计算速度;截断限流和比例限流方式能有效控制补偿电流,但是截断限流较比例限流更优越,截断限流控制简单,在补偿电流突增的情况下能及时控制过流,具有很好的实时性,而且截断限流的谐波总畸变率明显好于比例限流方式。
综上所述,采用ip、iq运算的数字实现方式和截断限流方式,对于并联型有源电力滤波器在提高实时性,最大程度发挥APF 的的补偿能力以及防止过流等方面,是一个简单可行的方法。
参考文献
[1] 王兆安, 杨君, 刘进军. 谐波抑制和无功补偿[M]. 机械工业出版社, 1998.
[2] Akagi H. New Trends in Active Filters for Power Condi-tioning [J]. IEEE Transactions on Industry Electronics,1996, 32 (6): 1312-1322.
[3] 李阳, 傅仲文. 有源电力滤波器参考电流算法的DSP实现方案[J]. 电测与仪表, 2005, 42(9): 16-19.
[4] 刘国海, 薛文平. 基于改进型谐波检测方法的并联型有源滤波器的闭环控制[J]. 东南大学学报, 2005, 35(增刊): 117-121.
[5] 杨振宇, 赵剑峰, 唐国庆. 并联型有源滤波器限流补偿策略研究[J]. 电力自动化设备, 2006, 26(3): 22-24.
作者简介
李国萍(1974-),女,硕士研究生,研究方向为电力电子与电力传动。
张代润(1965-),男,教授,研究方向为电力电子与电力传动。
范小波(1982-),男,硕士研究生,研究方向为电力电子与电力传动。

















