 打印本文
打印本文  关闭窗口
关闭窗口 步进电机细分控制原理
步进电机控制已经蕴含了细分的原理。电机内部磁场每旋转一个圆周, 步进电机前进一整个步距角。若四相步进电机按A→B→C→D→A 的顺序轮流通电, 即整步工作, 磁场分四拍旋转, 每次电流换向, 步进电机将前进整步距角的1/4。而按A→AB→B→BC→C→CD→D→DA→A 的顺序轮流通电, 即半步工作, 每次电流换向, 步进电机将前进整步距角的1/8。
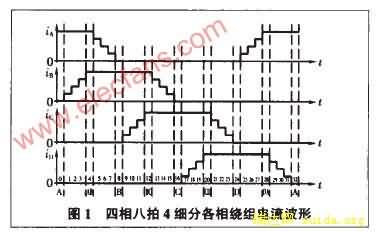
但是, 如果半步工作状态下每拍前进的角度超过控制精度要求, 则需要对步距角进行更进一步的细分。我们知道, 电磁力的大小跟绕组通电电流的大小是相关的。当通电相的电流不马上到达峰值, 而断电相的电流也不立
即降为零时, 电机内部磁场为上两相电流共同合成, 而产生的磁场合力, 会使转子有一个新的平衡位置, 这个新的平衡位置在原步距角的范围内。也就是说, 如果绕组电流的波形不再是一个近似方波, 而是分成N 个阶梯的近似阶梯波, 则电流每升或者降一个阶梯时, 转子转动一小步。当转子按照这个规律转过N 小步时, 实际相当于它转过一个步距角。这种将一个步距角分成若干小步的驱动方法, 称为细分驱动。
打印本文 关闭窗口