摘 要:分析了目前被普遍应用的串联型逆变器锁频锁相方法在实现逆 变 器工作状态控制时的优缺点,提出了一种复合锁频锁相方法,实现了定角控制,利用Matlab /Simulink进行了建模、仿真,仿真结果验证了复合锁频锁相方法的正确性和有效性。
关键词:串联型逆变器;锁频锁相;定角控制;相位补偿
串联型固态感应加热电源因其起动容易、易高频化的优点在高频感应加热领域被广泛应用 。为保证逆变器安全工作并提高工作效率,串联型逆变器一般工作在感性准谐振状态。目前 广泛应用的串联型逆变器锁频锁相方法虽然可以实现逆变器感性工作状态控制,但是负载功 率因数角随负载参数变化,不能实现定角控制,影响逆变器安全、稳定、高效地运行。所谓 定角控制是指在逆变器运行过程中保持功率因数角恒定,且不受负载参数变化影响,从而确 保逆变电源安全、稳定、高效地工作。本文从定角控制角度对串联型逆变器锁频锁相方法进 行研究,提出一种复合锁频锁相方法,实现了定角控制。
1锁频锁相控制方法
1.1锁频锁相控制方法分析
逆变器锁频锁相控制方法一般采用锁相环PLL电路。他主要由鉴相器PD、压控振荡器VCO和外 接低通滤波器LPF组成。锁相环是一个相位误差控制系统,他通过比较输入信号(控制信号 )和压控振荡器输出信号(被控制信号)之间的相位差来调节其输出频率,从而达到锁相环 路输入输出信号同频的目的。如果鉴相器和滤波参数选择适当,锁相环还可以实现无相差锁 频。串联型逆变器锁频锁相控制采用锁相环的目的是利用锁相环频率自动跟踪功能实现对负 载电压、电流的频率和相位关系的控制,使逆变器工作在感性准谐振状态。锁频锁相控制系 统框图如图1所示。
1.1锁频锁相控制方法分析
逆变器锁频锁相控制方法一般采用锁相环PLL电路。他主要由鉴相器PD、压控振荡器VCO和外 接低通滤波器LPF组成。锁相环是一个相位误差控制系统,他通过比较输入信号(控制信号 )和压控振荡器输出信号(被控制信号)之间的相位差来调节其输出频率,从而达到锁相环 路输入输出信号同频的目的。如果鉴相器和滤波参数选择适当,锁相环还可以实现无相差锁 频。串联型逆变器锁频锁相控制采用锁相环的目的是利用锁相环频率自动跟踪功能实现对负 载电压、电流的频率和相位关系的控制,使逆变器工作在感性准谐振状态。锁频锁相控制系 统框图如图1所示。
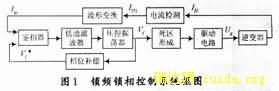
串联型逆变器锁频锁相电路的输入信号一般取表示负载谐振频率、相位的负载电流信号I H。压控振荡器的输出信号Vf经过死区形成电路和隔离驱动电路后,通过控制功 率开关器件的开通与挂断来控制负载电压的频率与相位,使负载电压的频率和相位随负载 电流的频率和相位变化。由于电流采样、隔离驱动、逆变功率开关器件的开通与挂断都需要 时间,导致锁相环输入输出信号的相位关系并不代表负载电压电流的相位关系,需加入相位 补偿环节,分析如图2所示。
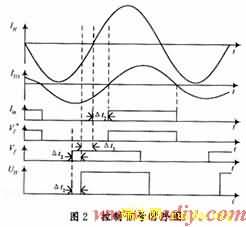
IH为主电路中负载电流波形,IH1为由电流互感器取出的负载电流信号,由于电 流互感器原边与副边信号间存在延时Δt1,则 IH1滞后IH的时间为Δt 1。从压控振荡器输出到功率开关器件开通,延时为Δt2,则UH滞后Vf的时间 为Δt2。锁相环锁定状态即Iin与Vf同频同相时,若不加入相位补偿环 节, 即 则负载电压滞后负载电流的时间为Δt1+Δt2,相位差φ= f×(Δt1+Δt2)×360°。可见,由于延时的存在,锁定状态下逆变器工 作在容性不安全状态。为弥补因控制信号延时引起的控制偏差,锁频锁相控制电路一般加入 相位补偿环节,当相位补偿环节完全补偿控制电路信号延时,即补偿时间Δt=Δt 1+Δt2时,锁相环输入输出信号的相位关系等于负载电压电流的相位关系,锁相 环锁定状态下负载功率因数角为0。为避免因负载参数变化使逆变器工作状态偏移到容性不 安全状态,一般控制逆变器工作在感性准谐振状态,实现方法是在相位补偿电路完全补偿控 制信号延时Δt1+Δt2基础上加入额外补偿时间Δt3,即相位补偿环节 总延时为Δt=Δt1+Δt2+Δt3,使得锁定状态下逆变器负载电 压相位超前负载电流Δt3,负载功率因数角φ=f×Δt3×360°,从而保 证了逆变器工作在感性状态。
则负载电压滞后负载电流的时间为Δt1+Δt2,相位差φ= f×(Δt1+Δt2)×360°。可见,由于延时的存在,锁定状态下逆变器工 作在容性不安全状态。为弥补因控制信号延时引起的控制偏差,锁频锁相控制电路一般加入 相位补偿环节,当相位补偿环节完全补偿控制电路信号延时,即补偿时间Δt=Δt 1+Δt2时,锁相环输入输出信号的相位关系等于负载电压电流的相位关系,锁相 环锁定状态下负载功率因数角为0。为避免因负载参数变化使逆变器工作状态偏移到容性不 安全状态,一般控制逆变器工作在感性准谐振状态,实现方法是在相位补偿电路完全补偿控 制信号延时Δt1+Δt2基础上加入额外补偿时间Δt3,即相位补偿环节 总延时为Δt=Δt1+Δt2+Δt3,使得锁定状态下逆变器负载电 压相位超前负载电流Δt3,负载功率因数角φ=f×Δt3×360°,从而保 证了逆变器工作在感性状态。
1.2锁频锁相方法存在的弊端
感应加热负载为导磁材料时,其导磁率与磁场强度和温度有关。当磁场强度一定时,导磁率 随温度升高而下降,且在居里点附近变化剧烈。负载从冷态被加热到热态过程中,磁性材料 负载的导磁率下降引起负载与线圈耦合电感减小、负载谐振频率上升。锁频锁相方法中反馈 回路相位补偿环节固定延时Δt3虽可使逆变器工作在感性状态,但负载频率变化时, 由Δt3所形成的负载功率因数角(φ=f×Δt3×360°)将随之变化 ,频率上升、功率因数角增加、频率下降、功率因数角减小。若相位补偿电路补偿时间按频 率较低时设定,则负载谐振频率升高后会引起负载功率因数角增加、逆变器效率降低。若补 偿时间按负载谐振频率较高时设定,则负载谐振频率低时负载功率因数角较小,逆变器安全 性降低。
综上所述:对于磁性材料负载,锁频锁相方法中相位补偿电路只能针对某一频率进行静态补 偿,无法在负载谐振频率变化前后实现对负载功率因数角的恒定控制。
1.2锁频锁相方法存在的弊端
感应加热负载为导磁材料时,其导磁率与磁场强度和温度有关。当磁场强度一定时,导磁率 随温度升高而下降,且在居里点附近变化剧烈。负载从冷态被加热到热态过程中,磁性材料 负载的导磁率下降引起负载与线圈耦合电感减小、负载谐振频率上升。锁频锁相方法中反馈 回路相位补偿环节固定延时Δt3虽可使逆变器工作在感性状态,但负载频率变化时, 由Δt3所形成的负载功率因数角(φ=f×Δt3×360°)将随之变化 ,频率上升、功率因数角增加、频率下降、功率因数角减小。若相位补偿电路补偿时间按频 率较低时设定,则负载谐振频率升高后会引起负载功率因数角增加、逆变器效率降低。若补 偿时间按负载谐振频率较高时设定,则负载谐振频率低时负载功率因数角较小,逆变器安全 性降低。
综上所述:对于磁性材料负载,锁频锁相方法中相位补偿电路只能针对某一频率进行静态补 偿,无法在负载谐振频率变化前后实现对负载功率因数角的恒定控制。
2复合锁频锁相控制方法
针对串联型逆变器锁频锁相控制方法在负载谐振频率变化前后不能实现定角控制的缺点, 本文提出了一种改进的锁频锁相控制方法——按负载电流扰动大小实现相位补偿的复合锁频 锁相方法。控制系统框图如图3所示。
针对串联型逆变器锁频锁相控制方法在负载谐振频率变化前后不能实现定角控制的缺点, 本文提出了一种改进的锁频锁相控制方法——按负载电流扰动大小实现相位补偿的复合锁频 锁相方法。控制系统框图如图3所示。
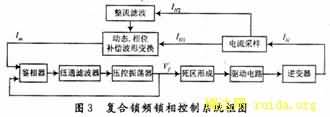
复合锁频锁相方法是锁频锁相闭环控制与定角开环控制相结合的控制系统,他在锁频锁相控 制电路基础上由动态相位补偿电路替代了目前所普遍采用的固定延时相位补偿电路,在负载 频率变化后自动调节功率因数角,从而提高锁频锁相环节的控制精度和动态性能,在逆变器 负载的动态变化过程中,既实现了频率跟踪,又实现了定角控制,保持逆变器功率因数角恒 定。
2.1动态相位补偿电路
理论分析及大量研究试验证明,串联型感应加热电源铁磁材料负载从冷态过渡到热态或从重 载变为轻载的过程中,负载电流频率(代表负载固有谐振频率)上升、负载电流幅值随之增 加,负载从热态过渡到冷态或从轻载变为重载的过程中,负载电流频率下降、负载电流幅值 随之减小。在加热过程中,负载电流频率和幅值是受负载参数变化影响的变量,本文在锁频 锁相控制电路基础上以电流扰动作为控制信号,设计了动态相位补偿电路,使相位补偿时间 跟随负载谐振频率变化,实现定角控制。动态相位补偿电路图和相位补偿电路波形如图4, 图5所示。
2.1动态相位补偿电路
理论分析及大量研究试验证明,串联型感应加热电源铁磁材料负载从冷态过渡到热态或从重 载变为轻载的过程中,负载电流频率(代表负载固有谐振频率)上升、负载电流幅值随之增 加,负载从热态过渡到冷态或从轻载变为重载的过程中,负载电流频率下降、负载电流幅值 随之减小。在加热过程中,负载电流频率和幅值是受负载参数变化影响的变量,本文在锁频 锁相控制电路基础上以电流扰动作为控制信号,设计了动态相位补偿电路,使相位补偿时间 跟随负载谐振频率变化,实现定角控制。动态相位补偿电路图和相位补偿电路波形如图4, 图5所示。
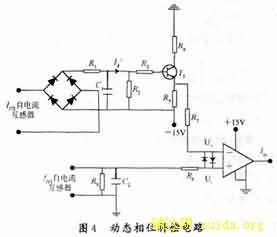
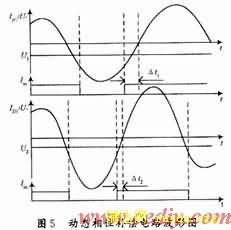
图4中,IH1,IH2为电流互感器取出的负载电流信号,IH1经电阻转换 成电压信号U-,IH2经整流滤波环节变为平直电流信号 三极管T1工作在 放大区。负载冷态或重载时,频率较低,电压比较器阀值电压U+=U1,补偿时间Δt=Δt1(见图5),负载功率因数角φ=f1×Δt1×360°。负载 温度 上升进入热态或发生轻载时,负载电流频率上升,同时负载电流幅值增加使增加 ,引起T1基极电流增加,发射极电位上升,电压比较器阀值电压U+=U2,U2> U1,补偿时间Δt=Δt2,Δt2 <Δt1,负载功率因数角φ =f2×Δt2×360°,补偿时间减小限制频率上升过程中负载电压电流相位差增 加,控制功率因数角基本不变,实现了定角控制。
三极管T1工作在 放大区。负载冷态或重载时,频率较低,电压比较器阀值电压U+=U1,补偿时间Δt=Δt1(见图5),负载功率因数角φ=f1×Δt1×360°。负载 温度 上升进入热态或发生轻载时,负载电流频率上升,同时负载电流幅值增加使增加 ,引起T1基极电流增加,发射极电位上升,电压比较器阀值电压U+=U2,U2> U1,补偿时间Δt=Δt2,Δt2 <Δt1,负载功率因数角φ =f2×Δt2×360°,补偿时间减小限制频率上升过程中负载电压电流相位差增 加,控制功率因数角基本不变,实现了定角控制。
在动态相位补偿电路中,负载功率因数角随负载参数变化而动态调整,确保逆变器具有稳定 的工作效率。另外,逆变器负载电流很大时,T1完全导通,动态相位补偿电路最小补 偿时间可以通过选择R4与R5的比值决定,R4的存在使逆变器严格工作在感性状 态,保证了逆变器具有较高的安全性能。
2.2仿真
基于目前普遍采用的锁频锁相控制方法和复合锁频锁相控制方法,本文利用Matlab/Simulin k建立了主电路和控制电路模型,并进行了仿真、比较。
在动态相位补偿电路中,负载功率因数角随负载参数变化而动态调整,确保逆变器具有稳定 的工作效率。另外,逆变器负载电流很大时,T1完全导通,动态相位补偿电路最小补 偿时间可以通过选择R4与R5的比值决定,R4的存在使逆变器严格工作在感性状 态,保证了逆变器具有较高的安全性能。
2.2仿真
基于目前普遍采用的锁频锁相控制方法和复合锁频锁相控制方法,本文利用Matlab/Simulin k建立了主电路和控制电路模型,并进行了仿真、比较。
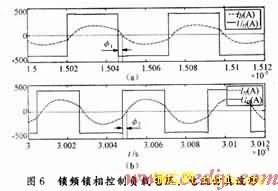
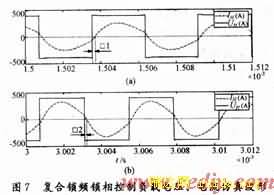
图6,7分别给出了采用目前普遍应用的锁频锁相控制和复合锁频锁相控制时负载电 压、电流仿真波形。仿真电路负载参数在2 ms时刻发生变化,以模拟加热过程中负载变化情 况。图6中,负载参数变化前,负载谐振频率为195 kHz,负载功率因数角为14°;负载参数 变化后,负载谐振频率为230 kHz,其变化率为17.9%,此时负载功率因数角为16.6°, 其变化率为18.6%,变化较大。图7中,负载参数变化前,负载谐振频率为180 kHz,负载功 率因数角为14°;负载参数变化后,负载谐振频率为210 kHz,其变化率为18%,此时负载 功率因数角为14.2°,其变化率为1.4%,负载功率因数角基本不变,可以达到定角控制 的效果。
3结语
本文分析了目前普遍应用的锁频锁相控制方法在实现逆变器工作状态控制时存在的 不能实现 定角控制的缺陷,在此基础上提出了一种复合锁频锁相控制方法,设计了动态相位补偿电路 ,实现了定角控制,有效地解决了加热负载由冷态到热态转变过程中以及发生重载或轻载时 功率因数变化较大的问题,并通过仿真验证了其正确性和有效性。
本文分析了目前普遍应用的锁频锁相控制方法在实现逆变器工作状态控制时存在的 不能实现 定角控制的缺陷,在此基础上提出了一种复合锁频锁相控制方法,设计了动态相位补偿电路 ,实现了定角控制,有效地解决了加热负载由冷态到热态转变过程中以及发生重载或轻载时 功率因数变化较大的问题,并通过仿真验证了其正确性和有效性。
参考文献
[1]郁顺康.自动控制理论[M].上海:同济大学出版社,1992.
[2]潘天明.工频和中频感应炉[M].北京:冶金工业出版社,1983.
[2]潘天明.工频和中频感应炉[M].北京:冶金工业出版社,1983.

















