A New Intelligent Simulative System of Direct Current
Abstract: HVDC (High Voltage Direct Current Transmission) Light technology is a new DC transmission technology developed on the basis of traditional HVDC from the 1990s. A back-to-back HVDC light system of the physical model was established in this paper. The TM320CLF2407 DSP was chosen to control the VSC. Completing the job of A/D conversion, zero-crossing detection, and calculation of PI control. According to the theory of control, control the system with fixed DC voltage and fixed DC current. The software was programmed under CCS environment. It was including sample calculation, PI control and form of PWM wave.
Keywords: HVDC; TMS320LF2407A DSP; PI Control
摘要: 轻型直流输电技术(HVDC Light)是20世纪90年代,在高压直流输电(HVDC)技术基础上发展起来的一项新技术。本文建立了一个背靠背轻型直流输电的物理模型。选用了TI公司专为基于控制的应用而设计的TMS320LF2407A DSP进行电压源换流器(VSC)的控制,主要完成A/D转换、过零检测、PI 控制计算等功能。在CCS环境下进行编程,程序主要分为采样计算,PI控制器设计和PWM波生成。
关键字: 轻型直流输电; TMS320LF2407A DSP; PI控制器
1 引言
随着晶闸管阀的应用和更先进的控制保护技术的发展,高压直流输电(HVDC)技术日趋成熟。目前,国际上关于轻型直流输电的研究,无论在工程实用化方面还是在基础理论方面都已比较深入。这种以电压源换流器、可关断器件和脉宽调制技术为基础的新一代直流输电技术,国际上电力方面的权威学术组织CIGRE和IEEE,将其正式称为“VSC HVDC”,即“电压源换流器型直流输电”。而ABB公司则称之为轻型直流输电(HVDC Light)。
2 轻型直流输电物理模型设计
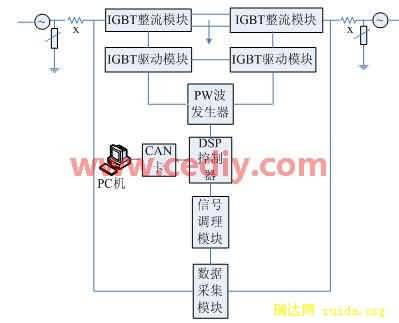
图1 背靠背轻型直流输电物理模型示意图
轻型HVDC物理模型由换流主回路和控制回路组成。主回路主要包括高通滤波器、换流电抗器、IGBT换流桥及其驱动、平波电抗器等。背靠背直流工程无直流侧输电线路,其直流侧谐波不会对通信系统造成干扰,因可降低直流侧滤波的要求,可以省去直流滤波器。控制回路主要由数据采集模块、信号调理模块、DSP控制模块等组成,如图1所示。其中换流回路选择了6MBI 20F-060IGBT换流桥和HCPL-316J驱动器。
1、信号采集电路设计。信号采集通路包括数据采样和信号调理。主要采集交流侧三相电压、电流和直流侧电压、电流。电压信号直接接到数据采样板的电压霍尔元件LEM LV 25_P 模块的电压输入端;电流信号要引线经过数据采样板的电流传感器LEM LA 55_P的穿孔。电压电流信号经传感器电路后都是一定幅值范围内的弱电压信号,送入信号调理电路。信号调理对传感器的输出信号进行相应处理,使其能满足数据采集卡的输入要求,并对数据采集卡实施保护。包括:信号放大、限幅,滤波,整形等。
2、过零信号是十分重要的,它对于系统之间功角的确定具有决定性意义。具体结构如图2所示。在该过零信号发生器中综合了过零信号的检测、过零信号的监视、过零信号的延时和三相过零信号的生成等主要功能。该过零信号生成器的信号跟踪能力较强,反应时间较短,精度较高。
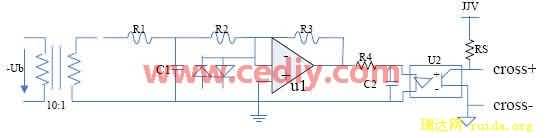
图2 过零电路结构示意图
3 DSP控制器系统硬件设计
在设计DSP应用系统时,如何选择根据系统要求选择合适的DSP芯片,是决定系统性能的一个非常重要的环节,只有选定了DSP芯片才能进一步设计外围电路集系统的其它电路。由于DSP芯片的发展速度很快,种类很多,一般来说,选择DSP芯片时要考虑性能、价格、硬件资源、开发工具和功耗等因素。通过综合考虑,本设计考虑采用TI公司的TMS320LF2407A DSP控制器。TMS320LF2407A专为数字电机控制和其它控制系统而设计的。是当前集成度最高、性能最强的运动控制芯片。不但有高性能的C2407 CPU内核,配置有高速数字信号处理的结构,且有单片电机控制的外设。将数字信号处理的高速运算功能,与面向电机的强大控制功能结合,成为传统多微处理器单元和多片系统的理想替代品。
3.1 TMS320LF2407A的事件管理器
在TMS320LF2407 系列芯片里,有一种被称为事件管理器的模块,这一模块具有一系列专门为运动控制和电机控制而设计的特殊功能和特性。这些特性在功率电子器件控制中同样表现非凡。事件管理器模块主要包含下述的功能模块。
1、事件管理器的PWM输出模块。TMS320LF2407A的事件管理器模块可同时产生多达8路的PWM波形输出,除通用定时器比较产生2个独立的PWM输出外,还可由3个带可编程死区控制的比较单元产生独立的3对。通用定时器周期寄存器的值决定了定时器的周期,当周期寄存器的值和定时器计数器的值之间产生匹配时,通用定时器的操作就停止并保持当前值,并根据计数器所处的计数方式执行复位为零或开始递减计数。在比较单元中,通用定时器1的计数器不断与比较寄存器的值进行比较,当发生匹配时,比较单元的两个输出将根据方式控制寄存器(ACTRA)中的位进行跳变。ACTRA寄存器中的位可以分别确定在比较匹配时每个输出为高有效触发或低有效触发。当通用定时器1的计数器和比较单元的比较寄存器发生匹配使能时,比较单元的比较中断寄存器将被置位。如果中断不屏蔽,则产生外设中断请求信号。为防止同一桥臂的上下两个开关管同时处于开状态,即通常所说的直通,造成短路事故,应在两个开关管开关交替时刻插入一段全部关的时间,即死区。对死区控制寄存器DBTCONA进行设置即可,一般在初始化中完成。可见,要产生一种特定的PWM波形,主要在于对周期寄存器、比较寄存器和比较方式寄存器、死区控制寄存器以及计数模式进行合理的设置。EVA模块PWM电路的结构框图如图2所示。

图2 PWM电路结构图DTPHX
2、事件管理器计时器单元模块。在事件管理器模块中一共有三个通用功能的计时器模块,分别为GP timer1,GP timer2和GP timer3。这三个计时器模块可以作为控制系统中采样脉冲的时基计时单元,也可以作为正交编码脉冲电路单元和捕获单元的时基计时器,以及作为PWM生成电路的时间基准计时器。本设计方案中用到了GP timer3的比较匹配中断。
每个计时器单元都有6种可选的工作模式。分别是停止/保持,单程增计数,连续的增计数,方向控制增/减计数,单程增/减计数和连续的增/减计数方式。各个计时器的工作方式通过对应的TxCON寄存器来进行配置。在本设计方案中,GP timer2和GP timer3都采用连续的增计数方式。
3、事件管理器捕获单元模块。在事件管理器模块中,一共有四个捕获单元,每个都有一个配套的捕获信号输入管脚。捕获单元用于记录当对应管脚上的捕获信号发生预定形式的变化时,通用的计时器 GP timer2 或 GP timer3 中的当前值。这个单元很适合于用来捕获同步信号脉冲。
3.2 TMS320LF2407的模数转换模块
LF2407A DSP具有16通道的模数转换(ADC)模块。本系统采用时间管理器起动方式,每次触发后依次对模拟量进行采样。在读取转换数据时,采用DSP的外部中断方式。当ADC转换结束时,产生一个结束信号,以此信号引起DSP中断,通知DSP把数据存入数据存储器RAM。数据采集完成后,将每个通道数据逐点采集到内存缓冲区中进行处理。
3.3过零点的测取
本方案中选用捕获单元CAP1,CAP2来做同步脉冲的捕获。其中CAP1用来捕获cross-信号的上升沿,CAP2用来捕获cross+信号的下降沿。同时选用通用计时器GP timer2来做捕获单元的时基计数器。这样控制寄存器CAPCON就应该被配置成CAPCON←1010000001100000b
同时将CAP1和CAP2的中断开放,并且设置两个自定义的变量tcross_neg和tcross_pos,分别用来存储CAP1和CAP2的捕获值。CAP1和CAP2的中断都是在EVI的第C组,对应于内核极中断INT4,中断向量分别为0033H和0034H。采用上述的方案时,事件管理器的中断屏蔽寄存器EVIMRC中的值为0003H。在CAP1的中断服务程序里,我们简单的更新tcross_neg的值,把CAP1FIFO中的值放到tcross_neg里面。在CAP2的中断服务程序里面,需要实现过零点检测的两点内插算法。
4 控制系统软件设计
代码生成工具主要包括C编译器和汇编器这两个DSP软件开发必须的工具和其他一些可选的工具。CCS(Code Composer Studio)是一个完整的DSP集成开发环境,也是目前最优秀、最流行的DSP开发软件之一。
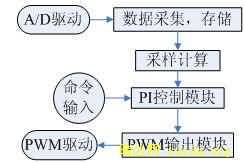
图3应用程序结构图
程序结构如图3所示,主要分成四个模块:数据实时采集模块、采样计算模块、PI 控制器模块和PWM输出模块。数据采集模块从A/D驱动提供的操作接口控制模数转换的执行以及数据读取,并存储到固定的数据文件中;数据采样模块从数据文件中读取数据,并按照一定的算法对数据进行初步处理,为控制算法提供所需的有物理意义的数据;PI控制器模块从数据文件中读取所需的数据,按照PI控制算法计算当前的PWM控制参数;PWM输出模块接收PWM控制参数,结合安全区算法,计算每路PWM的实际输出波形,送至PWM驱动器。
1、数据采集模块。DSP的A/D转换通道具有自动排序功能,而且由编程来确定选择哪一通道,采样软件采用中断方式实现,主程序完成系统初始化及其他计算处理,用事件管理模块B的定时器定时时间来启动A/D转换,转换完成后,在A/D中断服务子程序中将转换结果读出。
2、采样计算模块。适用于微机的实用交流采样算法主要有两种:积分法和傅氏算法。积分法:是从连续周期信号有效值定义式及平均功率定义式出发,用数值积分近似代替连续积分项进行计算的一种方法。付式算法:是将离散的采样值经过付式算法,求出电压、电流的实虚部,在频域中计算出功率的方法。
3、PI控制器设计。包括相位PI控制器和交流电压幅值PI控制器两种。
(1) 相位PI控制器。图4是相位PI控制器。Ud1r是直流电压预设值,Ud1是直流电压测量值,经滤波控制器,再经PI调节输出VSC1交流侧电压相位差δ1,和累加θs1,输出最后相位值θc1到 PWM。

图4 相位PI控制器
(2) 和相位PI控制器一样,交流电压幅值PI控制器设定值Qs1r和Qsl也是经过两个控制环节输出Uc。
4、SPWM波实现。为了扩展PWM波发生的能力和不影响DSP对主控制算法的计算,可将PWM发生信号输出至CPLD来产生SPWM波,以数据的方式通过PWM输出驱动,向CPLD发送命令和设定值。PI 控制器模块和 PWM 输出模块之间使用固定格式的数据接口。
本文作者创新点
本文一个轻型直流输电模型为换流回路选择了6MBI20F-060IGBT换流桥和HCPL-316J驱动器,为控制回路选择了TI公司的LF2407A DSP,并且为控制回路的实现设计了信号采集电路和过零比较电路。为控制系统的最后实现,在CCS环境下进行编程,程序主要分为采样计算,PI控制器设计和PWM波生成。
参考文献:
[1] 文俊等.轻型直流输电--种新一代的HVDC技术[J].电网技术.2003年1月第27卷第1期
[2] 刘金琨.先进PID控制MATLAB仿真(第二版) [M].电子工业出版社.2004年9月
[3] 刘和平等. TMS320LF240x DSP C语言开发应用[M].北京航空航天大学出版社.2003年1月
[4] 李征. 基于C/S和B/S模式的输电线路管理系统[J]. 微计算机信息, 2006, 8-3: 138-139
作者简介:
桑金歌(1975.3- ), 汉族, 男, 讲师, 研究兴趣: 智能控制系统
通信地址:天津市红桥区丁字沽一号路8号河北工业大学计算机软件学院 300130

















