Control System of Dimmer based on the Micro-Controller
Abstract: A kind of new-type airfield light dimmer control system is presented. System takes Intel 16 micro-controller as the core controller and adopts advanced IPM module that replaces the silicon as inverter so that the output waveforms have been heavily improved, which compare with the waveforms after chopping of silicon, which not only reduces the loss of the transformer, but also lengthens the light life-span. The application of CAN Bus makes the system supervised and managed easily.
Keywords: 16 Micro-Controller; Dimmer; CAN
摘要:本文设计出一种新型灯光调光控制系统。系统采用先进的智能功率模块((IPM)取代以往的可控硅作为功率变换器件,以Intel16位单片机为核心控制器采用AC-DC-AC变换技术使输出的波形较可控硅斩波后的波形有很大的改善,这不仅降低了变压器的损耗而且延长了灯的寿命,提高了系统的运行质量。现场总线CAN的运用使得整个系统便于集中监控、管理。
关键字:Intel16位单片机;调光器;CAN
1 引言
调光器是机场助航灯光系统的核心控制设备。目前,国内外使用的调光器主要采用可控硅斩波技术,这种调光器存在波形畸变大、电网要求高、对电网污染严重、效率低、负载适应能力差等缺点。针对以往系统存在的不足,提出了正弦波调光器,它采用逆变技术,输出标准正弦电压,它的优点是对负载适应能力强、对电网要求低、污染轻、效率高、输出波形好等。正弦波调光器采用逆变技术,输出幅度可调的标准正弦电压,通过控制算法实现对灯光回路的高精度恒流控制。“正弦波调光器”将极大地提高调光器的技术水平,改善调光器的性能,增强市场竞争能力。
2 控制系统硬件设计
2.1 系统总体设计
机场灯光调光器控制系统由电压传感器、电流传感器、人机接口、存储器接口、主回路等部分组成,示意框图如图1所示。

图1 系统总体设计框图
系统以Intel 16位单片机为控制核心,利用电压、电流传感器采集变压器二次侧电压和回路电流值。由于采集的信号为交流信号不能直接进行数模转换,经有效值转换电路得到它们的有效值直流信号,再经低通滤波、信号放大后送入单片机内部10位A/D转换器进行A/D转换,A/D转换后的值经过软件滤波后,电压值输出显示,电流值与光级设定值一同进入控制算法,算法的输出量参与到PWM信号产生机制中,最终调整输出等效正弦脉宽调制信号(SPWM)。
2.2 硬件详细设计
1、主回路设计。主回路由整流电路、逆变电路、滤波电路等组成,其框图如图2所示。

图2 调光器主回路框图
主回路中三相交流电压经全桥整流、滤波后得到直流电压,将此电压连接到IGBT(IPM)模块两端。单片机输出的等效正弦脉宽调制信号(SPWM)经过驱动电路控制两块IGBT(IPM)对加在其两端的直流电压进行逆变,输出的信号经过LC滤波电路后得到幅值可调的正弦电压。逆变后的电压经过升压变压器直接送入灯泡回路,从而改变回路的电流值,最终达到设定值。通过按键可以任意切换光级,当光级改变时由程序算法控制使电流、电压快速达到稳定值,完成光级的切换。同时,通过控制板上的数码管实时显示出变压器二次侧电压值和回路电流值,使系统的运行状态一目了然。系统工作时,可能由于某些情况产生了过压、过流等情况,导致IPM产生报警信号,单片机采用中断方式采集报警信号。
2、控制回路设计。核心控制模块是整个控制系统中最重要的一部分,它完成控制的全过程。核心控制器选用的是Intel 16位单片机80C196MC, 80C196MC由一个C196核心,一个三相波形发生器WFG和若干个其它片内外设构成,其它外设装置包括一个A/D转换器、一个事件处理阵列(EPA)、两个定时器和一个脉宽调制单元PWM。由于80C196MC内部的资源有限,需外扩EPROM、RAM,对于16位机实现外扩EPROM、RAM硬件连接起来比较麻烦,所以硬件设计时采用了可编程外围芯片PSD。通过编程决定它内部RAM、EPROM的大小。可编程外围芯片的运用简化了电路的设计。系统设计采用的是PSD302/301。
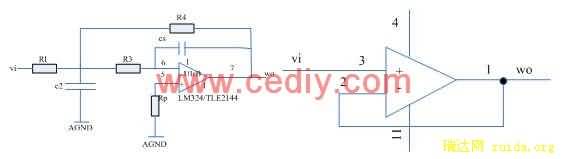
图3 二阶低通滤波器 图4 同相放大器
3、数据采集模块。该模块主要的功能是采集二次侧电压和回路电流,利用电流、电压互感器采集信号进入数据采集模块中。由于采集的信号为交流信号不能直接进行数模转换,必须经过有效值转换电路得到它们的有效值直流信号,系统设计时采用了AD536芯片完成这一功能。此外,信号中必然含有许多干扰信号,它们将直接影响测量精度,所以电路设计中加入了滤波电路,消除干扰信号。转换、滤波后的信号电压值偏小,不利于数模转换,所以电路中又加入了模拟信号的放大部分。
滤波部分采用的是有源滤波器中的无限增益多环反馈型滤波器即二阶低通滤波器。有源滤波器由电阻、电容和运算放大器组成。其中运算放大器采用的是LM324。二阶低通滤波器的示意图如图3所示。系统中采用的是增益可调反相放大器,经过调节可得到所需范围的电压信号。如图4所示。
4、人机接口模块。人机接口模块主要完成按键和显示功能。通过按键可以设定光级,用户可在5级光中任意选择。同时,系统将显示主回路变压器二次侧的电流、电压值。
该模块的功能主要是由芯片8279完成的。Intel 8279是一种通用可编程键盘、显示器接口芯片,它能完成键盘输入和显示控制两种功能。键盘部分提供一种扫描工作方式,可与64个按键的矩阵键盘连接,能对键盘不断扫描,自动消抖,自动识别出按下的键并给出编码,能对双键和n键同时按下实施保护。显示部分为发光二级管、荧光管及其它显示器提供了按扫描方式工作的显示接口,它为显示器提供多路复用信号,可显示16位的数字或字符。
5、驱动模块设计。驱动模块的设计主要是针对IPM的。该设计完成对IPM门极的驱动,以及对它的一些保护、去干扰措施。
3 控制系统软件设计
3.1 系统程序流程及抗干扰设计
图5 程序流程图
控制系统的软件采用中断处理和查询并用的方式。主程序完成循环查询按键、报警信号、A/D状态;中断处理程序分为三部分。首先,由于传感器采回来的信号有很多干扰信号存在,所以在系统软件设计时利用A/D多次采样值取平均值的方法消除干扰,第一部分的中断程序用来实现此功能。其次,根据SPWM信号产生的机制,第二部分中断程序完成必要的计算以产生所需值,再次,第三部分的中断程序能对来自IPM模块的报警信号做出响应,并
采取相应控制措施。程序的流程如图5所示。
系统软件设计产生PWM波形以正弦波为载波频率构成SPWM信号。系统采用C196进行编程,相对于汇编语言来说利用高级C语言使得编程简便、直观,调试也比较方便,提高了工作效率。编程过程中,首先要对一些参数初始化,以启动波形发生器。
窜入测控系统中的干扰,其频谱往往很宽,且有随机性,采用硬件抗干预措施,只能抑制某个频段的干扰,仍有一些干扰会侵入系统。需要采取软件抗干扰措施。软件抗干扰技术是当系统受干扰后使系统恢复正常运行或输入信号受干扰后去伪求真的一种辅助方法。由于软件设计灵活,节省硬件资源,所以软件抗干扰技术越来越引起人们的重视。叠加在系统被测模拟输入信号上的噪声干扰,导致较大的测量误差。但由于这些噪声的随机性,可以通过软件滤波(即数字滤波技术)剔除虚假信号,求其真值。系统采用了防脉冲干扰平均值滤波法、一阶滞后滤波法作为软件抗干扰措施。
3.2 系统控制算法设计
系统软件采用的是增量式分段PID控制器,分段式是指PID控制器在不同的区间采用不同的参数。增量式PID数字控制器差分方程为:

式中,kp, kd, ki,分别是比例、微分、积分参数,e (k)为时刻k的偏差,e (k-1)和e (k-2)分别是k-1及k-2时刻的偏差。u (k)为时刻k的输出值,u (k-1)为k-1时刻的输出值。kp, kd, ki经过现场调试整定为kp=2.5~4.5, kd=0~40, ki=0~0.05。根据设计,系统采用的是分段式PID,即e (k)较大时,kp, kd两个参数起作用,当e (k)小到一定范围内时kp, kd, ki三个参数共同作用。这就使得系统可以快速稳定的达到稳态值。系统设计时在控制算法后加上一个输出缓冲环节,通过它来调节输出的步长,一方面可以控制变化速度,另一方面通过输出的缓冲影响了 PID使系统快速达到稳定。程序实现中利用ram_k_step变量控制输出的步长,根据情况加减ram_k_step值。mark_wg是输出环节状态标志。
4 系统通讯功能设计
现代的控制系统不仅仅是单机系统,往往还增加了网络功能以便信息的集中管理。系统设计中采用的是控制局域网络CAN,利用该网络可把现场的数据及时送到上位机,实现系统监控、管理,同时上位机也通过总线系统发出指令。
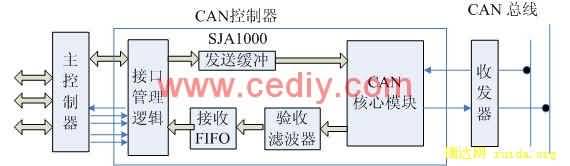
图5 CAN总线框图
CAN总线主要由CAN控制器和CAN总线收发接口电路组成。CAN控制器主要由CAN总线协议部分和与微控制器接口部分电路组成。CAN总线收发接口是CAN控制器与物理总线之间的接口。CAN总线的框图如图6所示。系统设计时CAN控制器选用的是SJA1000 (Philips公司生产),CAN总线收发接口采用的是82C250。系统设计时使CAN系统实现冗余的工作模式即采用了两个CAN控制器,形成两路CAN总线。系统运行时可保证至少有一路CAN总线工作,以保证系统的可靠性。CAN总线软件部分设计主要是采用中断处理方式,每当检测到CAN控制器产生中断,主控制器立即读取CAN控制器内部中断寄存器,判断是何种中断并作相应的处理。采用这种处理方式使编程比较简单.,有利于程序的规划。采用高级语言C进行编程使程序非常直观,有利于系统的调试,加快了开发周期,提高了工作效率。
CAN总线软件设计采用中断处理方式,通过CAN控制芯片内部中断寄存器判断是何中断,并进入相应的处理程序。要使CAN控制芯片工作首先必须对它初始化。
5 本文作者创新点
本文研究的对象是机场灯光调光器控制系统,设计出一种新型机场灯光调光器控制系统。它具有负载适应能力强、对电网要求低、污染轻、效率高、输出波形好等优点。采用先进的智能功率模块(IPM)取代以往的可控硅作为功率变换器件。本文研制的调光器采用逆变技术,输出标准正弦电压,通过控制算法实现对灯光回路的高精度恒流控制。最后,调光器加入了通讯接口的设计,使系统具有网络功能,以便信息的集中管理。现场总线CAN的运用实现了数据的现场传输,一种冗余的CAN系统进一步保证了传输的可靠性。
参考文献:
[1] 于海生.CAN总线工业测控网络系统的设计与实现[J].仪器仪表学报,2001,22卷(1)
[2] 王幸之,王雷成,王闪.单片机应用系统抗干扰措施[M].北京航空航天大学出版社,2000.2
[3] 许金捂,杨德斌,徐科.TURBO C实用大全[M].机械工业出版社,2001.5
[4] 黄乐天,谢意. 实用高精度智能恒温加热器系统设计[J]. 微计算机信息, 2005, 10-2: 2-26

















